%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23061b40;%20}%20.st1%20{%20fill:%20%23306af1;%20}%20.st2%20{%20fill:%20%235ce5cf;%20}%20%3c/style%3e%3c/defs%3e%3cg%3e%3cpath%20class='st0'%20d='M55,10.5h9v3h-9v9h12V7.5h-12v3ZM64,19.5h-6v-3h6v3Z'/%3e%3cpolygon%20class='st0'%20points='69%2016.5%2078%2016.5%2078%2019.5%2069%2019.5%2069%2022.5%2081%2022.5%2081%2013.5%2072%2013.5%2072%2010.5%2081%2010.5%2081%207.5%2069%207.5%2069%2016.5'/%3e%3cpolygon%20class='st0'%20points='95%2010.5%2095%207.5%2083%207.5%2083%2022.5%2095%2022.5%2095%2019.5%2086%2019.5%2086%2016.5%2095%2016.5%2095%2013.5%2086%2013.5%2086%2010.5%2095%2010.5'/%3e%3cpath%20class='st0'%20d='M40,1.5v21h11.6l1.4-1.4v-7.6h0c0,0-1.4-1.5-1.4-1.5l1.4-1.4V2.9l-1.4-1.4h-11.6ZM50,19.5h-7v-6h7v6ZM50,10.5h-7v-6h7v6Z'/%3e%3c/g%3e%3cpath%20class='st1'%20d='M23.1,24L14.7,4.8l-4.9,11.2h3.8l-1.8,4H3.3L12.1,0H2C.9,0,0,.9,0,2v20c0,1.1.9,2,2,2h21.1Z'/%3e%3cpath%20class='st2'%20d='M34,0h-16.8l10.6,24h6.2c1.1,0,2-.9,2-2V2C36,.9,35.1,0,34,0ZM32.5,20h-4V4h4v16Z'/%3e%3c/svg%3e)
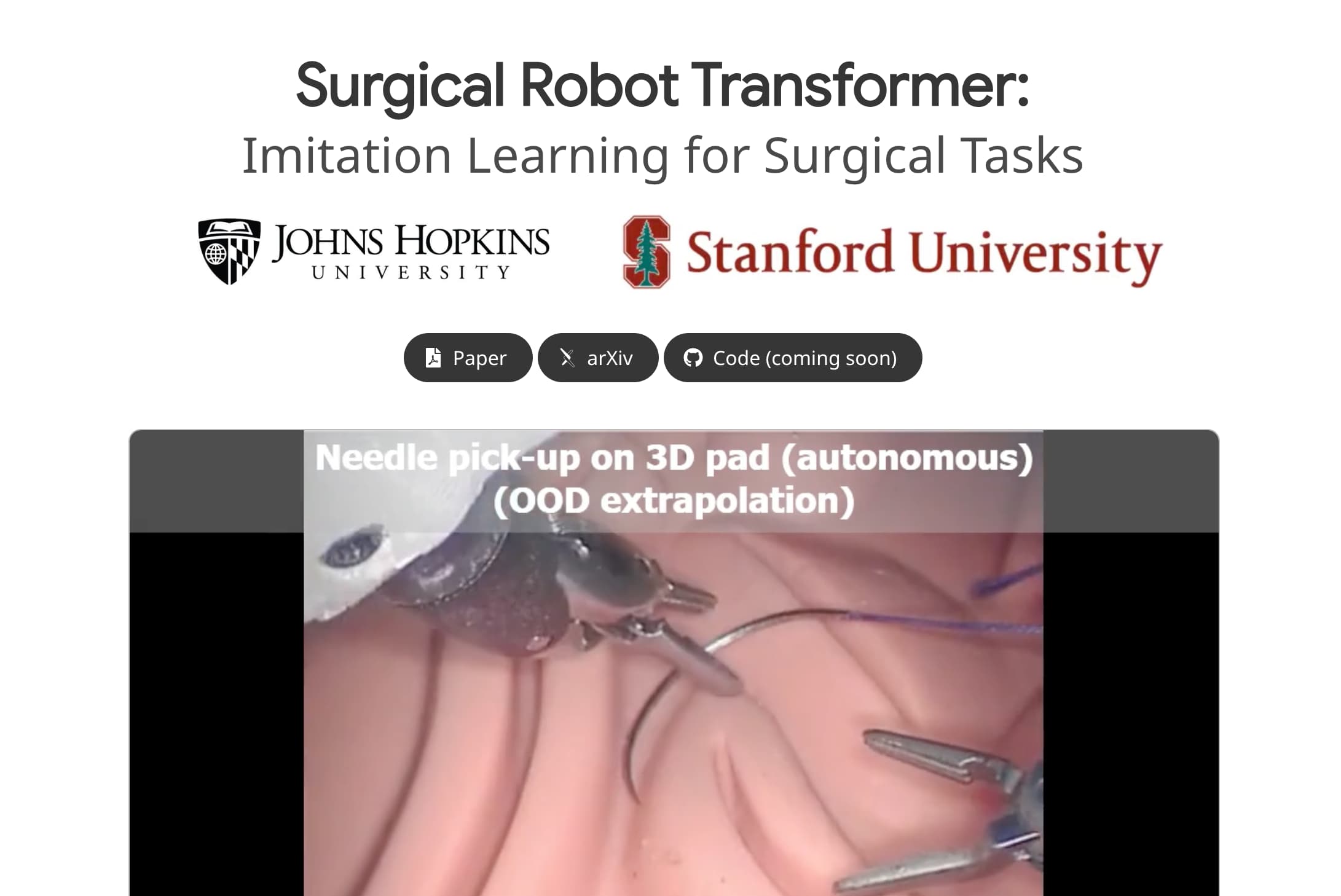
Surgical Robot Transformer
簡介 :
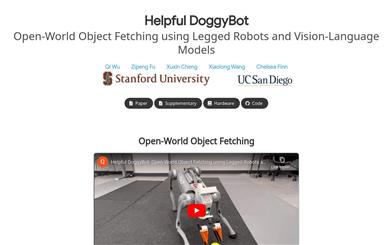
Surgical Robot Transformer 是一種通過模仿學習在達芬奇機器人上執行手術操作任務的模型。該模型通過相對動作公式克服了達芬奇系統的前向運動學不準確的問題,使得機器人能夠成功地訓練和部署政策。這種方法的一個顯著優勢是可以直接利用包含近似運動學的大量臨床數據進行機器人學習,而無需進一步校正。該模型展示了在執行三個基本手術任務(包括組織操作、針頭處理和結紮)方面的成功。
需求人群 :
目標受眾主要是醫療領域的研究人員和手術機器人的開發者。該技術能夠幫助他們在手術機器人的自動化和精確控制方面取得突破,提高手術的成功率和安全性。
使用場景
在組織操作中,機器人能夠精確地抓取和移動組織。
在針頭處理任務中,機器人能夠成功地拿起和傳遞針頭。
在結紮任務中,機器人能夠完成複雜的結紮動作。
產品特色
通過模仿學習實現手術任務的自動化
使用達芬奇機器人的相對運動學數據進行政策訓練
成功執行基本手術任務,如組織操作、針頭處理和結紮
利用手腕攝像頭提高手術操作任務的學習性能
不依賴於達芬奇的前向運動學數據,降低因數據不準確導致的失敗率
基於ACT(基於變換器的架構)的模型設計
通過實驗驗證相對運動的一致性優於絕對前向運動學
使用教程
1. 準備手術機器人和相關設備。
%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%230080ff;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st0'%20d='M16.2,11.1c.4.5.4,1.2,0,1.8l-4.7,7.1h-3.8l5.3-8L7.6,4h3.8l4.7,7.1Z'/%3e%3c/svg%3e)
2. 通過模仿學習訓練機器人執行手術任務。
3. 使用手腕攝像頭增強機器人的視覺感知能力。
4. 利用相對運動公式進行政策訓練,確保機器人動作的一致性。
5. 在不同的機器人配置下重複實驗,驗證相對運動的一致性。
6. 部署訓練好的政策,讓機器人在實際手術中執行任務。
7. 監控和評估機器人在手術中的表現,確保其準確性和安全性。