%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23061b40;%20}%20.st1%20{%20fill:%20%23306af1;%20}%20.st2%20{%20fill:%20%235ce5cf;%20}%20%3c/style%3e%3c/defs%3e%3cg%3e%3cpath%20class='st0'%20d='M55,10.5h9v3h-9v9h12V7.5h-12v3ZM64,19.5h-6v-3h6v3Z'/%3e%3cpolygon%20class='st0'%20points='69%2016.5%2078%2016.5%2078%2019.5%2069%2019.5%2069%2022.5%2081%2022.5%2081%2013.5%2072%2013.5%2072%2010.5%2081%2010.5%2081%207.5%2069%207.5%2069%2016.5'/%3e%3cpolygon%20class='st0'%20points='95%2010.5%2095%207.5%2083%207.5%2083%2022.5%2095%2022.5%2095%2019.5%2086%2019.5%2086%2016.5%2095%2016.5%2095%2013.5%2086%2013.5%2086%2010.5%2095%2010.5'/%3e%3cpath%20class='st0'%20d='M40,1.5v21h11.6l1.4-1.4v-7.6h0c0,0-1.4-1.5-1.4-1.5l1.4-1.4V2.9l-1.4-1.4h-11.6ZM50,19.5h-7v-6h7v6ZM50,10.5h-7v-6h7v6Z'/%3e%3c/g%3e%3cpath%20class='st1'%20d='M23.1,24L14.7,4.8l-4.9,11.2h3.8l-1.8,4H3.3L12.1,0H2C.9,0,0,.9,0,2v20c0,1.1.9,2,2,2h21.1Z'/%3e%3cpath%20class='st2'%20d='M34,0h-16.8l10.6,24h6.2c1.1,0,2-.9,2-2V2C36,.9,35.1,0,34,0ZM32.5,20h-4V4h4v16Z'/%3e%3c/svg%3e)
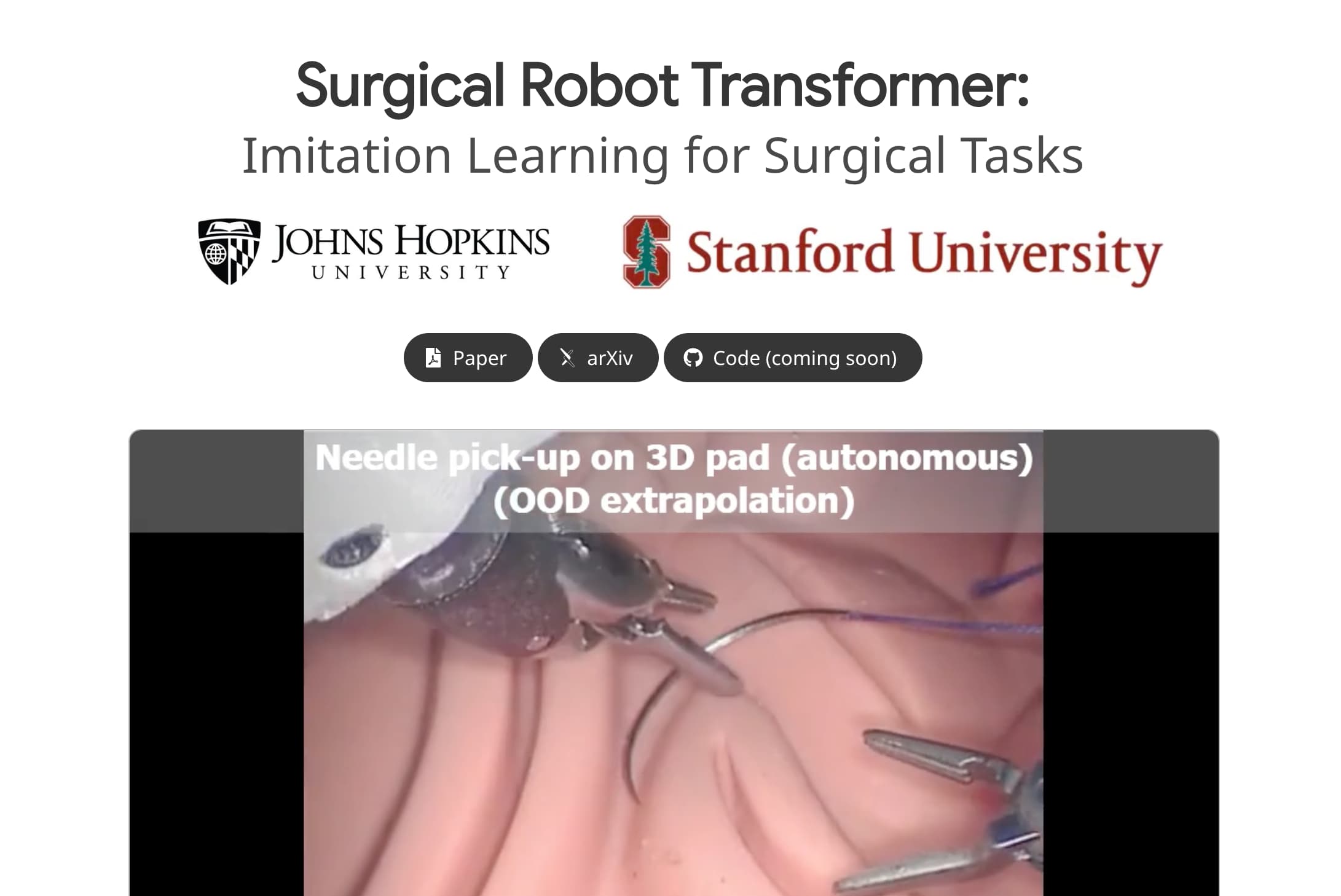
Surgical Robot Transformer
Overview :
The Surgical Robot Transformer is a model that executes surgical operation tasks on the Da Vinci robot using imitation learning. This model overcomes the inaccuracies in forward kinematics of the Da Vinci system through relative motion formulas, enabling the successful training and deployment of policies. One significant advantage of this approach is the ability to leverage a large amount of clinical data containing approximate kinematics for robot learning without additional calibration. The model has demonstrated success in executing three fundamental surgical tasks, including tissue manipulation, needle handling, and suturing.
Target Users :
The primary audience consists of researchers in the medical field and developers of surgical robots. This technology aids them in achieving breakthroughs in the automation and precise control of surgical robots, thereby enhancing the success rates and safety of surgical procedures.
Use Cases
In tissue manipulation, the robot can accurately grasp and maneuver tissue.
In needle handling tasks, the robot can successfully pick up and transfer needles.
In suturing tasks, the robot can perform complex suturing actions.
Features
Automate surgical tasks through imitation learning.
Utilize relative kinematic data from the Da Vinci robot for policy training.
Successfully perform fundamental surgical tasks such as tissue manipulation, needle handling, and suturing.
Enhance the learning performance of surgical tasks using a wrist-mounted camera.
Reduce failure rates caused by data inaccuracies by not relying on Da Vinci's forward kinematics data.
Model design based on ACT (Architecture based on Transformers).
Experimental validation shows that the consistency of relative motion is superior to absolute forward kinematics.
How to Use
1. Prepare the surgical robot and associated equipment.
%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%230080ff;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st0'%20d='M16.2,11.1c.4.5.4,1.2,0,1.8l-4.7,7.1h-3.8l5.3-8L7.6,4h3.8l4.7,7.1Z'/%3e%3c/svg%3e)
2. Train the robot to perform surgical tasks through imitation learning.
3. Enhance the robot's visual perception using a wrist-mounted camera.
4. Train policies using relative motion formulas to ensure consistency in robot movements.
5. Repeat experiments under different robot configurations to verify the consistency of relative motion.
6. Deploy the trained policies to allow the robot to perform tasks in actual surgeries.
7. Monitor and evaluate the robot's performance during surgeries to ensure accuracy and safety.


Featured AI Tools

Tongyi Ren Xin
TongYi Ren Xin is a personal health assistant that provides health report queries, symptom inquiries, drug information, and disease inquiries. All content is AI-generated and intended for medical knowledge popularization only. It does not constitute professional medical advice. Users with health concerns should seek medical attention promptly and follow their doctor's instructions.
AI medical health
154.3K
Medtrinity 25M
MedTrinity-25M is a large-scale multimodal dataset featuring multi-granular medical annotations. Developed by multiple authors, it aims to advance research in medical image and text processing. The dataset's construction involves steps such as data extraction and multi-granular text description generation, supporting various medical image analysis tasks, such as visual question answering (VQA) and pathology image analysis.
AI medical health
85.8K