%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23061b40;%20}%20.st1%20{%20fill:%20%23306af1;%20}%20.st2%20{%20fill:%20%235ce5cf;%20}%20%3c/style%3e%3c/defs%3e%3cg%3e%3cpath%20class='st0'%20d='M55,10.5h9v3h-9v9h12V7.5h-12v3ZM64,19.5h-6v-3h6v3Z'/%3e%3cpolygon%20class='st0'%20points='69%2016.5%2078%2016.5%2078%2019.5%2069%2019.5%2069%2022.5%2081%2022.5%2081%2013.5%2072%2013.5%2072%2010.5%2081%2010.5%2081%207.5%2069%207.5%2069%2016.5'/%3e%3cpolygon%20class='st0'%20points='95%2010.5%2095%207.5%2083%207.5%2083%2022.5%2095%2022.5%2095%2019.5%2086%2019.5%2086%2016.5%2095%2016.5%2095%2013.5%2086%2013.5%2086%2010.5%2095%2010.5'/%3e%3cpath%20class='st0'%20d='M40,1.5v21h11.6l1.4-1.4v-7.6h0c0,0-1.4-1.5-1.4-1.5l1.4-1.4V2.9l-1.4-1.4h-11.6ZM50,19.5h-7v-6h7v6ZM50,10.5h-7v-6h7v6Z'/%3e%3c/g%3e%3cpath%20class='st1'%20d='M23.1,24L14.7,4.8l-4.9,11.2h3.8l-1.8,4H3.3L12.1,0H2C.9,0,0,.9,0,2v20c0,1.1.9,2,2,2h21.1Z'/%3e%3cpath%20class='st2'%20d='M34,0h-16.8l10.6,24h6.2c1.1,0,2-.9,2-2V2C36,.9,35.1,0,34,0ZM32.5,20h-4V4h4v16Z'/%3e%3c/svg%3e)
Maniwav
簡介 :
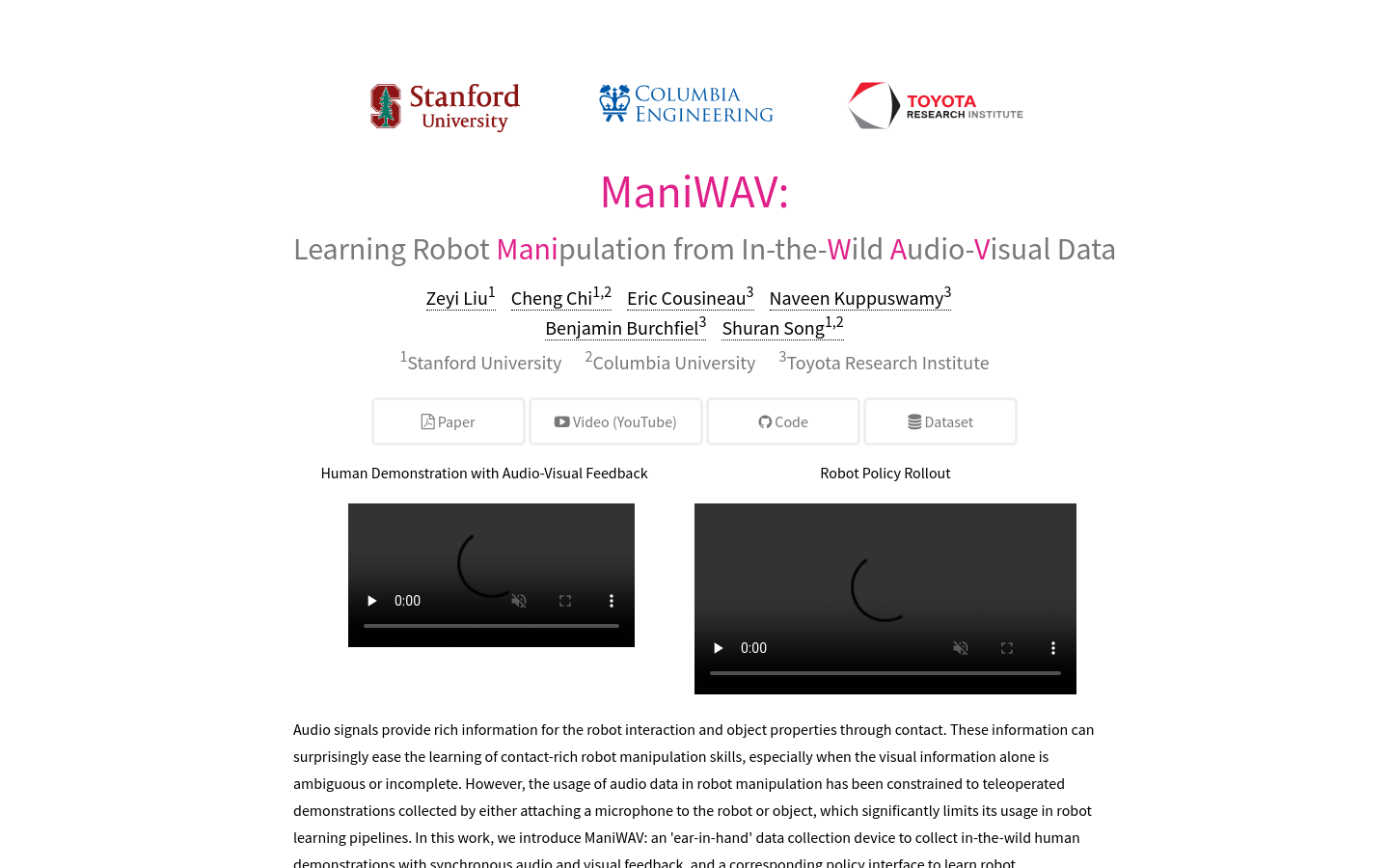
ManiWAV是一個研究項目,旨在通過野外的音頻和視覺數據學習機器人操控技能。它通過收集人類演示的同步音頻和視覺反饋,並通過相應的策略接口直接從演示中學習機器人操控策略。該模型展示了通過四個接觸豐富的操控任務來證明其系統的能力,這些任務需要機器人被動地感知接觸事件和模式,或主動地感知物體表面的材料和狀態。此外,該系統還能夠通過學習多樣化的野外人類演示來泛化到未見過的野外環境中。
需求人群 :
ManiWAV的目標受眾主要是機器人學和人工智能領域的研究者和開發者。他們可以利用ManiWAV來提高機器人在複雜環境中的操控技能,尤其是在視覺信息不明確或不完整的情況下,通過音頻信息增強機器人的感知能力。
使用場景
使用ManiWAV系統擦拭白板上的圖形
利用ManiWAV翻轉平底鍋中的百吉餅
使用ManiWAV將骰子從一個杯子倒入另一個杯子
使用ManiWAV用Velcro膠帶固定電線
產品特色
通過音頻信號提供豐富的交互和物體屬性信息
使用'ear-in-hand'數據收集設備同步收集音頻和視覺反饋
直接從人類演示中學習機器人操控策略
在四個接觸豐富的操控任務中展示系統能力
通過多樣化的野外人類演示學習,實現對未見過環境的泛化
使用教程
1. 安裝並設置ManiWAV數據收集設備,確保音頻和視覺反饋同步
%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%230080ff;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st0'%20d='M16.2,11.1c.4.5.4,1.2,0,1.8l-4.7,7.1h-3.8l5.3-8L7.6,4h3.8l4.7,7.1Z'/%3e%3c/svg%3e)
2. 收集人類演示數據,包括接觸事件和物體表面材料的音頻信號
3. 使用收集的數據訓練機器人操控策略
4. 在不同的野外環境中測試和驗證策略的有效性
5. 根據測試結果調整策略,以提高機器人的泛化能力
6. 將訓練好的策略應用於實際的機器人操控任務


精選AI產品推薦

Universal Manipulation Interface
通用操作接口(UMI)是一個數據收集和策略學習框架,允許直接將現場人類演示中的技能轉移到可部署的機器人策略。UMI採用手持夾具與仔細的界面設計相結合,實現便攜、低成本和信息豐富的數據收集,用於挑戰性的雙手和動態操作演示。為促進可部署的策略學習,UMI結合了精心設計的策略界面,具有推理時延遲匹配和相對軌跡動作表示。從而產生的學習策略與硬件無關,並且可以在多個機器人平臺上部署。配備這些功能,UMI框架解鎖了新的機器人操作功能,僅通過為每個任務更改訓練數據,允許泛化的動態、雙手、精確和長時間的行為,從而實現零次調整。我們通過全面的真實環境實驗演示了UMI的通用性和有效性,其中僅通過使用各種人類演示進行訓練的UMI策略,在面對新環境和對象時實現了零次調整的泛化。
AI機器人
100.2K
Cyberdemo
CyberDemo是一個旨在通過模擬人類演示來增強現實世界中靈巧操作的項目。它可能涉及到機器人技術、機器學習和模擬環境的結合,以提高機器人在複雜環境中的操作能力。
AI機器人
61.3K