%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23061b40;%20}%20.st1%20{%20fill:%20%23306af1;%20}%20.st2%20{%20fill:%20%235ce5cf;%20}%20%3c/style%3e%3c/defs%3e%3cg%3e%3cpath%20class='st0'%20d='M55,10.5h9v3h-9v9h12V7.5h-12v3ZM64,19.5h-6v-3h6v3Z'/%3e%3cpolygon%20class='st0'%20points='69%2016.5%2078%2016.5%2078%2019.5%2069%2019.5%2069%2022.5%2081%2022.5%2081%2013.5%2072%2013.5%2072%2010.5%2081%2010.5%2081%207.5%2069%207.5%2069%2016.5'/%3e%3cpolygon%20class='st0'%20points='95%2010.5%2095%207.5%2083%207.5%2083%2022.5%2095%2022.5%2095%2019.5%2086%2019.5%2086%2016.5%2095%2016.5%2095%2013.5%2086%2013.5%2086%2010.5%2095%2010.5'/%3e%3cpath%20class='st0'%20d='M40,1.5v21h11.6l1.4-1.4v-7.6h0c0,0-1.4-1.5-1.4-1.5l1.4-1.4V2.9l-1.4-1.4h-11.6ZM50,19.5h-7v-6h7v6ZM50,10.5h-7v-6h7v6Z'/%3e%3c/g%3e%3cpath%20class='st1'%20d='M23.1,24L14.7,4.8l-4.9,11.2h3.8l-1.8,4H3.3L12.1,0H2C.9,0,0,.9,0,2v20c0,1.1.9,2,2,2h21.1Z'/%3e%3cpath%20class='st2'%20d='M34,0h-16.8l10.6,24h6.2c1.1,0,2-.9,2-2V2C36,.9,35.1,0,34,0ZM32.5,20h-4V4h4v16Z'/%3e%3c/svg%3e)
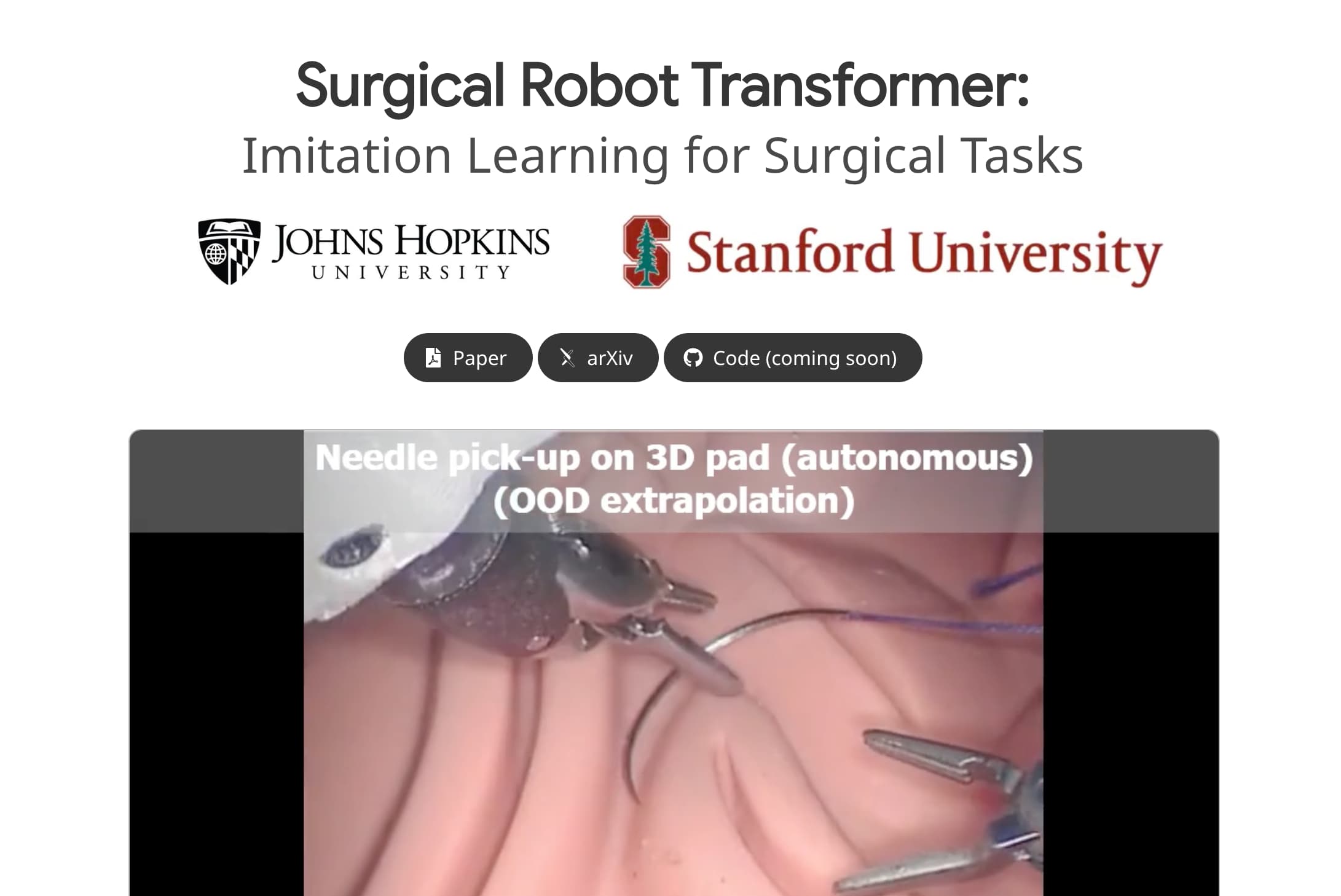
手術ロボットトランスフォーマー
紹介 :
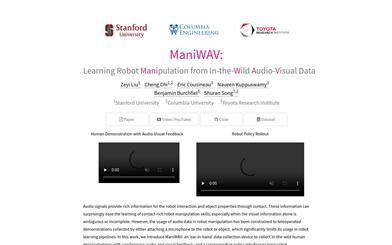
Surgical Robot Transformerは、模倣学習を用いてダビンチ手術ロボット上で手術操作タスクを実行するモデルです。このモデルは、相対運動方程式を用いることでダビンチシステムの順運動学の不正確さを克服し、ロボットによるポリシーの学習と展開を成功させています。この手法の大きな利点は、近似運動学を含む大量の臨床データを、さらなる補正なしに直接ロボット学習に活用できることです。本モデルは、組織操作、針の操作、結紮を含む3つの基本的な手術タスクの実行において成功を収めています。
ターゲットユーザー :
主な対象ユーザーは、医療分野の研究者および手術ロボット開発者です。この技術は、手術ロボットの自動化と精密制御におけるブレークスルーを支援し、手術の成功率と安全性の向上に貢献します。
使用シナリオ
組織操作において、ロボットは組織を正確に把持?移動できる。
針の操作タスクにおいて、ロボットは針を成功裏に掴んで渡すことができる。
結紮タスクにおいて、ロボットは複雑な結紮動作を完了できる。
製品特徴
模倣学習による手術タスクの自動化
ダビンチ手術ロボットの相対運動学データを用いたポリシー学習
組織操作、針の操作、結紮などの基本的な手術タスクの成功裏での実行
手首カメラを活用した手術操作タスクの学習性能向上
ダビンチ手術ロボットの順運動学データに依存しないため、データの不正確さによる失敗率を低減
ACT(トランスフォーマーベースのアーキテクチャ)に基づくモデル設計
実験により、相対運動の一貫性が絶対順運動学よりも優れていることを検証済み
使用チュートリアル
1. 手術ロボットおよび関連機器の準備を行う。
%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%230080ff;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st0'%20d='M16.2,11.1c.4.5.4,1.2,0,1.8l-4.7,7.1h-3.8l5.3-8L7.6,4h3.8l4.7,7.1Z'/%3e%3c/svg%3e)
2. 模倣学習を用いてロボットに手術タスクを実行させるための学習を行う。
3. 手首カメラを用いてロボットの視覚認識能力を高める。
4. 相対運動方程式を用いてポリシー学習を行い、ロボット動作の一貫性を確保する。
5. 異なるロボット構成下で実験を繰り返し、相対運動の一貫性を検証する。
6. 学習済みのポリシーを展開し、ロボットに実際の手術タスクを実行させる。
7. 手術中のロボットの挙動を監視?評価し、正確性と安全性を確保する。



おすすめAI製品

通義仁心
通義仁心は、個人向けの健康アシスタントです。検査結果、症状、薬物、病気に関する質問にお答えします。全てのコンテンツはAIによって生成されたものであり、医学知識の普及を目的とした参考情報です。専門的な医療アドバイスではありません。健康上の問題がある場合は、速やかに医療機関を受診し、医師の指示に従ってください。
AI医療健康
152.4K

ユニバーサル操作インターフェース
ユニバーサル操作インターフェース(UMI)は、現場における人間のデモンストレーションのスキルを直接展開可能なロボット戦略に移行できるデータ収集と戦略学習のフレームワークです。UMIは、持ち運び可能な夾具と慎重に設計されたインターフェースを組み合わせることで、持ち運びやすく、低コストで情報量の多いデータ収集を実現し、困難な両手操作や動的な操作デモにも対応します。展開可能な戦略学習を促進するために、UMIは、推論時の遅延マッチングと相対的な軌跡動作表現を特徴とする、綿密に設計された戦略インターフェースを組み込んでいます。これにより、生成される学習戦略はハードウェアに依存せず、複数のロボットプラットフォームに展開できます。これらの機能を備えたUMIフレームワークは、各タスクのトレーニングデータを変えるだけで、動的で、両手で行う、精密で、長時間動作する汎化された動作を可能にし、ゼロショット調整で新しいロボット操作機能を解き放ちます。私たちは、様々な人間のデモンストレーションのみを用いてトレーニングされたUMI戦略が、新しい環境やオブジェクトに直面した場合でも、ゼロショット調整による汎化を実現したことを、包括的な現実環境実験で実証しました。
AI機械人
99.1K