%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23061b40;%20}%20.st1%20{%20fill:%20%23306af1;%20}%20.st2%20{%20fill:%20%235ce5cf;%20}%20%3c/style%3e%3c/defs%3e%3cg%3e%3cpath%20class='st0'%20d='M55,10.5h9v3h-9v9h12V7.5h-12v3ZM64,19.5h-6v-3h6v3Z'/%3e%3cpolygon%20class='st0'%20points='69%2016.5%2078%2016.5%2078%2019.5%2069%2019.5%2069%2022.5%2081%2022.5%2081%2013.5%2072%2013.5%2072%2010.5%2081%2010.5%2081%207.5%2069%207.5%2069%2016.5'/%3e%3cpolygon%20class='st0'%20points='95%2010.5%2095%207.5%2083%207.5%2083%2022.5%2095%2022.5%2095%2019.5%2086%2019.5%2086%2016.5%2095%2016.5%2095%2013.5%2086%2013.5%2086%2010.5%2095%2010.5'/%3e%3cpath%20class='st0'%20d='M40,1.5v21h11.6l1.4-1.4v-7.6h0c0,0-1.4-1.5-1.4-1.5l1.4-1.4V2.9l-1.4-1.4h-11.6ZM50,19.5h-7v-6h7v6ZM50,10.5h-7v-6h7v6Z'/%3e%3c/g%3e%3cpath%20class='st1'%20d='M23.1,24L14.7,4.8l-4.9,11.2h3.8l-1.8,4H3.3L12.1,0H2C.9,0,0,.9,0,2v20c0,1.1.9,2,2,2h21.1Z'/%3e%3cpath%20class='st2'%20d='M34,0h-16.8l10.6,24h6.2c1.1,0,2-.9,2-2V2C36,.9,35.1,0,34,0ZM32.5,20h-4V4h4v16Z'/%3e%3c/svg%3e)

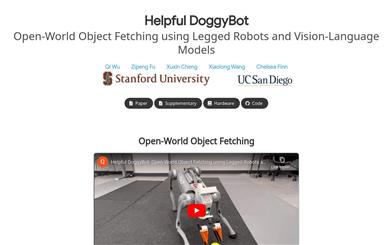
Helpful DoggyBot
簡介 :
Helpful DoggyBot是一個四足機器人室內移動操作系統,它通過前端夾持裝置進行物體操作,使用在模擬環境中訓練的低級控制器實現敏捷技能,如攀爬和全身傾斜。此外,它還結合了預訓練的視覺-語言模型(VLMs)進行語義理解和命令生成。該系統在沒有實際數據收集或訓練的情況下,能在未見過的環境中零樣本泛化完成任務,如按照用戶的指令在攀爬過後的床邊取回隨機放置的玩具,成功率達到60%。
需求人群 :
Helpful DoggyBot適合於科研人員、機器人愛好者和自動化領域的專業人士。它為研究和開發四足機器人提供了一個平臺,可以用於探索機器人在家庭、救援和其他需要複雜交互的環境中的應用。
使用場景
在家庭環境中按照用戶的指令取回玩具
在救援場景中攀爬障礙物並執行搜索任務
在自動化倉庫中進行貨物搬運
產品特色
前端夾持裝置用於物體操作
低級控制器在模擬環境中訓練,實現攀爬和全身傾斜等敏捷技能
使用預訓練的視覺-語言模型(VLMs)進行語義理解和命令生成
無需實際數據收集或訓練即可在新環境中零樣本泛化完成任務
能夠理解用戶的指令並執行相應的操作
在室內環境中具有較高的可達性和通過性
支持與人類互動,執行室內技能任務
使用教程
1. 安裝並配置所需的硬件和軟件環境
%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%230080ff;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st0'%20d='M16.2,11.1c.4.5.4,1.2,0,1.8l-4.7,7.1h-3.8l5.3-8L7.6,4h3.8l4.7,7.1Z'/%3e%3c/svg%3e)
2. 下載並安裝Helpful DoggyBot的代碼
3. 根據文檔設置機器人的低級控制器
4. 配置視覺-語言模型以理解特定命令
5. 在模擬環境中進行初步測試,確保機器人能夠執行基本操作
6. 在實際環境中部署機器人並進行任務測試
7. 根據測試結果調整機器人的參數和操作邏輯
8. 持續監控機器人的性能並進行必要的維護

精選AI產品推薦
Openui
構建UI組件通常是一項乏味的工作。OpenUI旨在使這一過程變得有趣、快捷和靈活。這也是我們在W&B用於測試和原型化下一代工具的工具,用於在LLM的基礎上構建強大的應用程序。您可以使用想象力描述UI,然後即時查看渲染效果。您可以要求進行更改,並將HTML轉換為React、Svelte、Web組件等。就像是V0的開源和不太精緻的版本。
AI開發助手
784.7K
Opendevin
OpenDevin是一個開源項目,目標是複製、增強和創新Devin——一個能夠執行復雜工程任務並與用戶在軟件開發項目上積極協作的自主AI軟件工程師。該項目通過開源社區的力量,探索和擴展Devin的能力,識別其優勢和改進空間,以指導開源代碼模型的進展。
AI開發助手
613.0K