%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23061b40;%20}%20.st1%20{%20fill:%20%23306af1;%20}%20.st2%20{%20fill:%20%235ce5cf;%20}%20%3c/style%3e%3c/defs%3e%3cg%3e%3cpath%20class='st0'%20d='M55,10.5h9v3h-9v9h12V7.5h-12v3ZM64,19.5h-6v-3h6v3Z'/%3e%3cpolygon%20class='st0'%20points='69%2016.5%2078%2016.5%2078%2019.5%2069%2019.5%2069%2022.5%2081%2022.5%2081%2013.5%2072%2013.5%2072%2010.5%2081%2010.5%2081%207.5%2069%207.5%2069%2016.5'/%3e%3cpolygon%20class='st0'%20points='95%2010.5%2095%207.5%2083%207.5%2083%2022.5%2095%2022.5%2095%2019.5%2086%2019.5%2086%2016.5%2095%2016.5%2095%2013.5%2086%2013.5%2086%2010.5%2095%2010.5'/%3e%3cpath%20class='st0'%20d='M40,1.5v21h11.6l1.4-1.4v-7.6h0c0,0-1.4-1.5-1.4-1.5l1.4-1.4V2.9l-1.4-1.4h-11.6ZM50,19.5h-7v-6h7v6ZM50,10.5h-7v-6h7v6Z'/%3e%3c/g%3e%3cpath%20class='st1'%20d='M23.1,24L14.7,4.8l-4.9,11.2h3.8l-1.8,4H3.3L12.1,0H2C.9,0,0,.9,0,2v20c0,1.1.9,2,2,2h21.1Z'/%3e%3cpath%20class='st2'%20d='M34,0h-16.8l10.6,24h6.2c1.1,0,2-.9,2-2V2C36,.9,35.1,0,34,0ZM32.5,20h-4V4h4v16Z'/%3e%3c/svg%3e)

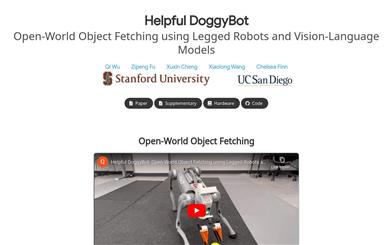
Helpful DoggyBot
紹介 :
Helpful DoggyBotは、四足歩行ロボットの室内移動OSです。前端の把持装置による物体操作を行い、シミュレーション環境で訓練された低レベルコントローラにより、登攀や全身傾斜などの敏捷な動作を実現します。さらに、事前学習済みの視覚言語モデル(VLMs)を統合することで、意味理解と命令生成を行います。本システムは、実際のデータ収集や訓練なしに、未見の環境においてゼロショット汎化でタスクを実行でき、例えば、ユーザーの指示に従って、登攀後のベッド脇にランダムに置かれたおもちゃを拾い上げるタスクを、60%の成功率で達成します。
ターゲットユーザー :
Helpful DoggyBotは、研究者、ロボット愛好家、そして自動化分野の専門家の方に最適です。四足歩行ロボットの研究開発のためのプラットフォームを提供し、家庭、救助、その他複雑なインタラクションを必要とする環境におけるロボットの応用を探求するために使用できます。
使用シナリオ
家庭環境でユーザーの指示に従って玩具を拾う
救助現場で障害物を登攀し、捜索タスクを実行する
自動化倉庫で貨物の搬送を行う
製品特徴
前端の把持装置による物体操作
シミュレーション環境で訓練された低レベルコントローラによる、登攀や全身傾斜などの敏捷な動作の実現
事前学習済みの視覚言語モデル(VLMs)による意味理解と命令生成
実際のデータ収集や訓練なしに、新しい環境でゼロショット汎化によるタスク実行が可能
ユーザーの指示を理解し、それに応じた操作を実行
室内環境において高い到達性と通過性を有する
人間とのインタラクションをサポートし、室内作業タスクを実行
使用チュートリアル
1. 必要なハードウェアとソフトウェア環境をインストールして設定する
%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%230080ff;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st0'%20d='M16.2,11.1c.4.5.4,1.2,0,1.8l-4.7,7.1h-3.8l5.3-8L7.6,4h3.8l4.7,7.1Z'/%3e%3c/svg%3e)
2. Helpful DoggyBotのコードをダウンロードしてインストールする
3. ドキュメントに従ってロボットの低レベルコントローラを設定する
4. 特定の命令を理解するよう視覚言語モデルを設定する
5. シミュレーション環境で予備テストを行い、ロボットが基本操作を実行できることを確認する
6. 実際の環境でロボットを展開し、タスクテストを行う
7. テスト結果に基づいてロボットのパラメータと動作ロジックを調整する
8. ロボットの性能を継続的に監視し、必要なメンテナンスを行う

おすすめAI製品
Openui
UIコンポーネントの構築は、多くの場合退屈な作業です。OpenUIは、このプロセスを楽しく、迅速で、柔軟なものにすることを目指しています。これは、W&Bが次世代ツールのテストとプロトタイピングに使用しているツールであり、LLMを基盤とした強力なアプリケーションを構築するために使用されます。想像力でUIを記述し、リアルタイムでレンダリング結果を確認できます。変更を要求し、HTMLをReact、Svelte、Webコンポーネントなどに変換できます。V0のオープンソース版で、多少洗練されていないバージョンと考えてください。
AI開発助手
756.0K
Opendevin
OpenDevinは、複雑なエンジニアリングタスクを実行し、ソフトウェア開発プロジェクトにおいてユーザーと積極的に連携する自律型AIソフトウェアエンジニアであるDevinを複製、強化、そして革新することを目的としたオープンソースプロジェクトです。本プロジェクトはオープンソースコミュニティの力を活用し、Devinの能力を探求?拡張し、その強みと改善すべき点を特定することで、オープンソースコードモデルの進歩を導きます。
AI開発助手
598.4K