%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23061b40;%20}%20.st1%20{%20fill:%20%23306af1;%20}%20.st2%20{%20fill:%20%235ce5cf;%20}%20%3c/style%3e%3c/defs%3e%3cg%3e%3cpath%20class='st0'%20d='M55,10.5h9v3h-9v9h12V7.5h-12v3ZM64,19.5h-6v-3h6v3Z'/%3e%3cpolygon%20class='st0'%20points='69%2016.5%2078%2016.5%2078%2019.5%2069%2019.5%2069%2022.5%2081%2022.5%2081%2013.5%2072%2013.5%2072%2010.5%2081%2010.5%2081%207.5%2069%207.5%2069%2016.5'/%3e%3cpolygon%20class='st0'%20points='95%2010.5%2095%207.5%2083%207.5%2083%2022.5%2095%2022.5%2095%2019.5%2086%2019.5%2086%2016.5%2095%2016.5%2095%2013.5%2086%2013.5%2086%2010.5%2095%2010.5'/%3e%3cpath%20class='st0'%20d='M40,1.5v21h11.6l1.4-1.4v-7.6h0c0,0-1.4-1.5-1.4-1.5l1.4-1.4V2.9l-1.4-1.4h-11.6ZM50,19.5h-7v-6h7v6ZM50,10.5h-7v-6h7v6Z'/%3e%3c/g%3e%3cpath%20class='st1'%20d='M23.1,24L14.7,4.8l-4.9,11.2h3.8l-1.8,4H3.3L12.1,0H2C.9,0,0,.9,0,2v20c0,1.1.9,2,2,2h21.1Z'/%3e%3cpath%20class='st2'%20d='M34,0h-16.8l10.6,24h6.2c1.1,0,2-.9,2-2V2C36,.9,35.1,0,34,0ZM32.5,20h-4V4h4v16Z'/%3e%3c/svg%3e)
Maniwav
紹介 :
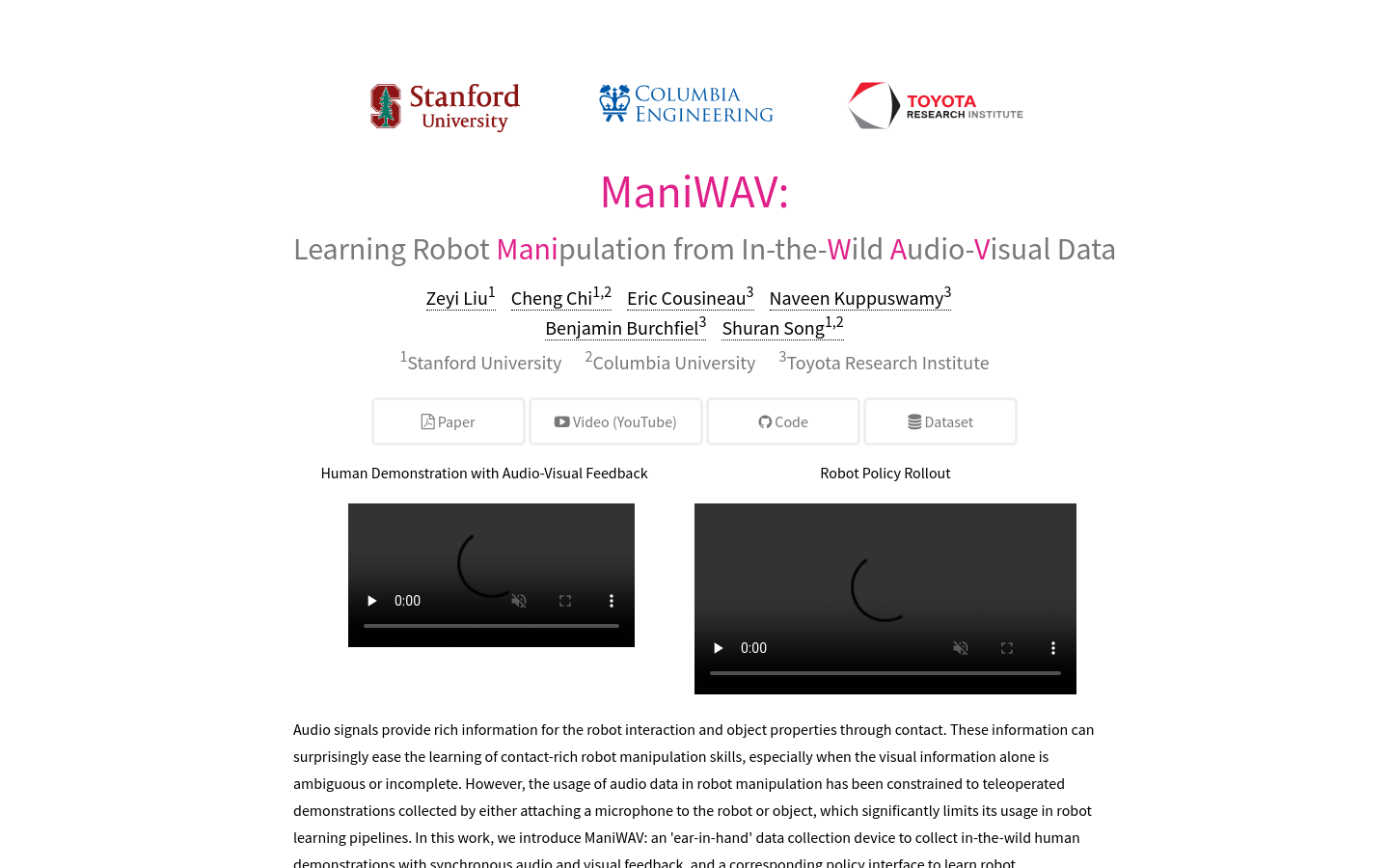
ManiWAVは、野外の音声と映像データを用いてロボット操作スキルを学習することを目的とした研究プロジェクトです。人間の操作デモンストレーションから同期した音声と映像のフィードバックを収集し、対応する戦略インターフェースを通じて、デモンストレーションから直接ロボット操作戦略を学習します。本モデルは、ロボットが接触事象やパターンをパッシブに感知したり、物体表面の材質や状態をアクティブに感知する必要がある、接触が豊富な4つの操作タスクを通じて、システムの能力を実証しています。さらに、多様な野外の人のデモンストレーションを学習することで、未経験の野外環境にも一般化することができます。
ターゲットユーザー :
ManiWAVのターゲットユーザーは、主にロボット工学と人工知能分野の研究者や開発者です。彼らはManiWAVを利用して、特に視覚情報が不明瞭または不完全な場合、音声情報によってロボットの知覚能力を高め、複雑な環境におけるロボットの操作スキルを向上させることができます。
使用シナリオ
ManiWAVシステムを使用してホワイトボード上の図形を拭く
ManiWAVを使用してフライパンの中のベーグルをひっくり返す
ManiWAVを使用してサイコロをカップから別のカップに注ぐ
ManiWAVを使用してベルクロテープで電線を固定する
製品特徴
音声信号から豊富なインタラクションと物体の属性情報を提供する
'ear-in-hand'データ収集デバイスを用いて音声と映像のフィードバックを同期して収集する
人間のデモンストレーションから直接ロボット操作戦略を学習する
接触が豊富な4つの操作タスクにおいてシステム能力を実証する
多様な野外の人のデモンストレーションを学習することで、未経験の環境への一般化を実現する
使用チュートリアル
1. ManiWAVデータ収集デバイスをインストールおよび設定し、音声と映像のフィードバックが同期していることを確認する
%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%230080ff;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st0'%20d='M16.2,11.1c.4.5.4,1.2,0,1.8l-4.7,7.1h-3.8l5.3-8L7.6,4h3.8l4.7,7.1Z'/%3e%3c/svg%3e)
2. 接触事象と物体表面の材質の音声信号を含む、人間の操作デモンストレーションデータを収集する
3. 収集したデータを用いてロボット操作戦略を学習する
4. さまざまな野外環境で戦略の有効性をテストおよび検証する
5. テスト結果に基づいて戦略を調整し、ロボットの汎化能力を向上させる
6. 学習済みの戦略を実際のロボット操作タスクに適用する

おすすめAI製品

ユニバーサル操作インターフェース
ユニバーサル操作インターフェース(UMI)は、現場における人間のデモンストレーションのスキルを直接展開可能なロボット戦略に移行できるデータ収集と戦略学習のフレームワークです。UMIは、持ち運び可能な夾具と慎重に設計されたインターフェースを組み合わせることで、持ち運びやすく、低コストで情報量の多いデータ収集を実現し、困難な両手操作や動的な操作デモにも対応します。展開可能な戦略学習を促進するために、UMIは、推論時の遅延マッチングと相対的な軌跡動作表現を特徴とする、綿密に設計された戦略インターフェースを組み込んでいます。これにより、生成される学習戦略はハードウェアに依存せず、複数のロボットプラットフォームに展開できます。これらの機能を備えたUMIフレームワークは、各タスクのトレーニングデータを変えるだけで、動的で、両手で行う、精密で、長時間動作する汎化された動作を可能にし、ゼロショット調整で新しいロボット操作機能を解き放ちます。私たちは、様々な人間のデモンストレーションのみを用いてトレーニングされたUMI戦略が、新しい環境やオブジェクトに直面した場合でも、ゼロショット調整による汎化を実現したことを、包括的な現実環境実験で実証しました。
AI機械人
99.6K
Cyberdemo
CyberDemoは、人間のデモンストレーションを模倣することで、現実世界の器用な操作を向上させることを目的としたプロジェクトです。ロボット工学、機械学習、シミュレーション環境の組み合わせを駆使し、複雑な環境下でのロボットの操作能力向上を目指しています。
AI機械人
59.6K