%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23061b40;%20}%20.st1%20{%20fill:%20%23306af1;%20}%20.st2%20{%20fill:%20%235ce5cf;%20}%20%3c/style%3e%3c/defs%3e%3cg%3e%3cpath%20class='st0'%20d='M55,10.5h9v3h-9v9h12V7.5h-12v3ZM64,19.5h-6v-3h6v3Z'/%3e%3cpolygon%20class='st0'%20points='69%2016.5%2078%2016.5%2078%2019.5%2069%2019.5%2069%2022.5%2081%2022.5%2081%2013.5%2072%2013.5%2072%2010.5%2081%2010.5%2081%207.5%2069%207.5%2069%2016.5'/%3e%3cpolygon%20class='st0'%20points='95%2010.5%2095%207.5%2083%207.5%2083%2022.5%2095%2022.5%2095%2019.5%2086%2019.5%2086%2016.5%2095%2016.5%2095%2013.5%2086%2013.5%2086%2010.5%2095%2010.5'/%3e%3cpath%20class='st0'%20d='M40,1.5v21h11.6l1.4-1.4v-7.6h0c0,0-1.4-1.5-1.4-1.5l1.4-1.4V2.9l-1.4-1.4h-11.6ZM50,19.5h-7v-6h7v6ZM50,10.5h-7v-6h7v6Z'/%3e%3c/g%3e%3cpath%20class='st1'%20d='M23.1,24L14.7,4.8l-4.9,11.2h3.8l-1.8,4H3.3L12.1,0H2C.9,0,0,.9,0,2v20c0,1.1.9,2,2,2h21.1Z'/%3e%3cpath%20class='st2'%20d='M34,0h-16.8l10.6,24h6.2c1.1,0,2-.9,2-2V2C36,.9,35.1,0,34,0ZM32.5,20h-4V4h4v16Z'/%3e%3c/svg%3e)

ASAP
簡介 :
ASAP(Aligning Simulation and Real-World Physics for Learning Agile Humanoid Whole-Body Skills)是一種創新的兩階段框架,旨在解決模擬與現實世界之間的動態不匹配問題,從而實現人形機器人的敏捷全身技能。該技術通過預訓練運動跟蹤策略,並結合現實世界數據訓練的殘差動作模型,顯著提高了機器人在複雜動態環境中的適應性和協調性。ASAP的主要優點包括高效的數據利用、顯著的性能提升以及對複雜動作的精準控制。該技術為未來人形機器人的開發提供了新的方向,尤其是在需要高度靈活性和適應性的應用場景中。
需求人群 :
該產品適用於機器人技術研究人員、人工智能開發者以及需要開發高度靈活人形機器人的企業和機構。它能夠幫助他們快速實現複雜動作的遷移和優化,減少開發成本和時間。
使用場景
在IsaacGym到IsaacSim的遷移中,ASAP顯著提高了機器人動作的流暢性和準確性。
在IsaacGym到Genesis的遷移中,ASAP通過殘差動作模型優化了機器人的動態性能。
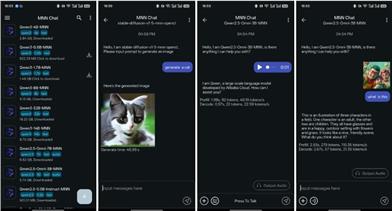
在真實世界的Unitree G1人形機器人上,ASAP實現了複雜動作的精準執行,如側跳和踢腿。
產品特色
通過模擬預訓練實現運動跟蹤策略
利用現實世界數據訓練殘差動作模型以補償動態差異
實現模擬與現實物理的對齊,提升技能遷移效果
支持多種人形機器人平臺,包括仿真環境和真實機器人
顯著降低運動跟蹤誤差,提高動作的敏捷性和協調性
使用教程
1. 在模擬環境中使用人類運動數據預訓練運動跟蹤策略。
%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%230080ff;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st0'%20d='M16.2,11.1c.4.5.4,1.2,0,1.8l-4.7,7.1h-3.8l5.3-8L7.6,4h3.8l4.7,7.1Z'/%3e%3c/svg%3e)
2. 在現實世界中部署預訓練策略,收集真實軌跡數據。
3. 基於真實數據訓練殘差動作模型,以補償模擬與現實之間的動態差異。
4. 將殘差動作模型集成到模擬器中,對預訓練策略進行微調。
5. 將微調後的策略部署到現實世界中,實現敏捷的全身技能。

精選AI產品推薦
中文精選
Kimi K1.5
Kimi k1.5 是由 MoonshotAI 開發的多模態語言模型,通過強化學習和長上下文擴展技術,顯著提升了模型在複雜推理任務中的表現。該模型在多個基準測試中達到了行業領先水平,例如在 AIME 和 MATH-500 等數學推理任務中超越了 GPT-4o 和 Claude Sonnet 3.5。其主要優點包括高效的訓練框架、強大的多模態推理能力以及對長上下文的支持。Kimi k1.5 主要面向需要複雜推理和邏輯分析的應用場景,如編程輔助、數學解題和代碼生成等。
模型訓練與部署
285.4K
國外精選
Ollama
Ollama是一款本地大語言模型工具,讓用戶能夠快速運行Llama 2、Code Llama和其他模型。用戶可以自定義和創建他們自己的模型。Ollama目前支持macOS和Linux,Windows版本即將推出。該產品定位於為用戶提供本地化的大語言模型運行環境,以滿足用戶個性化的需求。
模型訓練與部署
274.1K