%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23061b40;%20}%20.st1%20{%20fill:%20%23306af1;%20}%20.st2%20{%20fill:%20%235ce5cf;%20}%20%3c/style%3e%3c/defs%3e%3cg%3e%3cpath%20class='st0'%20d='M55,10.5h9v3h-9v9h12V7.5h-12v3ZM64,19.5h-6v-3h6v3Z'/%3e%3cpolygon%20class='st0'%20points='69%2016.5%2078%2016.5%2078%2019.5%2069%2019.5%2069%2022.5%2081%2022.5%2081%2013.5%2072%2013.5%2072%2010.5%2081%2010.5%2081%207.5%2069%207.5%2069%2016.5'/%3e%3cpolygon%20class='st0'%20points='95%2010.5%2095%207.5%2083%207.5%2083%2022.5%2095%2022.5%2095%2019.5%2086%2019.5%2086%2016.5%2095%2016.5%2095%2013.5%2086%2013.5%2086%2010.5%2095%2010.5'/%3e%3cpath%20class='st0'%20d='M40,1.5v21h11.6l1.4-1.4v-7.6h0c0,0-1.4-1.5-1.4-1.5l1.4-1.4V2.9l-1.4-1.4h-11.6ZM50,19.5h-7v-6h7v6ZM50,10.5h-7v-6h7v6Z'/%3e%3c/g%3e%3cpath%20class='st1'%20d='M23.1,24L14.7,4.8l-4.9,11.2h3.8l-1.8,4H3.3L12.1,0H2C.9,0,0,.9,0,2v20c0,1.1.9,2,2,2h21.1Z'/%3e%3cpath%20class='st2'%20d='M34,0h-16.8l10.6,24h6.2c1.1,0,2-.9,2-2V2C36,.9,35.1,0,34,0ZM32.5,20h-4V4h4v16Z'/%3e%3c/svg%3e)

ASAP
紹介 :
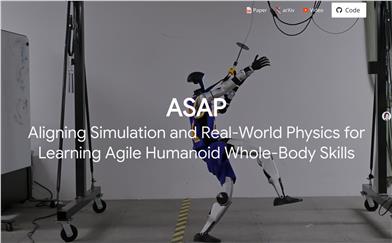
ASAP(Aligning Simulation and Real-World Physics for Learning Agile Humanoid Whole-Body Skills)は、シミュレーションと現実世界の動的な不一致問題を解決し、ヒューマノイドロボットの敏捷な全身技能を実現するための革新的な二段階フレームワークです。この技術は、事前にトレーニングされたモーショントラッキング戦略と、現実世界のデータでトレーニングされた残差動作モデルを組み合わせることで、複雑な動的環境におけるロボットの適応性と協調性を大幅に向上させます。ASAPの主な利点には、効率的なデータ活用、パフォーマンスの顕著な向上、複雑な動作の正確な制御が含まれます。この技術は、特に高い柔軟性と適応性が求められるアプリケーションシナリオにおいて、将来のヒューマノイドロボット開発に新たな方向性を提供します。
ターゲットユーザー :
この製品は、ロボット工学研究者、人工知能開発者、高度な柔軟性を備えたヒューマノイドロボットを開発する必要がある企業や機関に適しています。複雑な動作の移行と最適化を迅速に実現し、開発コストと時間を削減できます。
使用シナリオ
Isaac GymからIsaac Simへの移行において、ASAPはロボット動作の滑らかさと精度を大幅に向上させました。
Isaac GymからGenesisへの移行において、ASAPは残差動作モデルによってロボットの動的性能を最適化しました。
現実世界のUnitree G1ヒューマノイドロボットにおいて、ASAPはサイドステップやキックなどの複雑な動作を正確に実行しました。
製品特徴
シミュレーションによる事前トレーニングでモーショントラッキング戦略を実現
現実世界のデータを使用して、動的な差異を補正するための残差動作モデルを訓練
シミュレーションと現実世界の物理法則を一致させ、技能転移の効果を高める
シミュレーション環境と実ロボットを含む、多様なヒューマノイドロボットプラットフォームをサポート
モーショントラッキングの誤差を大幅に低減し、動作の敏捷性と協調性を向上
使用チュートリアル
1. シミュレーション環境で人間の運動データを使用して、モーショントラッキング戦略を事前トレーニングする。
%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%230080ff;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st0'%20d='M16.2,11.1c.4.5.4,1.2,0,1.8l-4.7,7.1h-3.8l5.3-8L7.6,4h3.8l4.7,7.1Z'/%3e%3c/svg%3e)
2. 現実世界で事前トレーニングされた戦略を展開し、実際の軌跡データを収集する。
3. 実際のデータに基づいて、シミュレーションと現実世界の動的な差異を補正するための残差動作モデルをトレーニングする。
4. 残差動作モデルをシミュレータに統合し、事前トレーニングされた戦略を微調整する。
5. 微調整された戦略を現実世界に展開し、敏捷な全身技能を実現する。



おすすめAI製品
中国語精選
Kimi K1.5
Kimi k1.5は、MoonshotAIによって開発されたマルチモーダル言語モデルです。強化学習とロングコンテキスト拡張技術により、複雑な推論タスクにおけるモデルのパフォーマンスが大幅に向上しました。AIMEやMATH-500などの数学的推論タスクにおいて、GPT-4oやClaude Sonnet 3.5を上回るなど、複数のベンチマークテストで業界トップレベルの成果を達成しています。主な利点としては、効率的なトレーニングフレームワーク、強力なマルチモーダル推論能力、ロングコンテキストのサポートなどが挙げられます。Kimi k1.5は、プログラミング支援、数学の問題解決、コード生成など、複雑な推論と論理分析を必要とするアプリケーションシナリオを主に対象としています。
モデルトレーニングとデプロイ
219.1K
Botdocs
Botdocsは、人工知能による一般的なカスタマーサービスのやり取りのトレーニングに使用される、一連の高品質なデータセットです。大規模言語モデル、インテント分類器、自然言語理解エンジンをトレーニングし、企業が一般的なカスタマーサービスのやり取りを自動化し、顧客の意図を理解し、卓越した顧客体験を提供するのに役立ちます。Botdocsは、AI開発者やシステムが、大規模言語モデル、インテント分類器、自然言語理解エンジンに対して異なるニーズを持つことを考慮し、CSV、JSONL、Dialogflow(ES)形式で提供されています。
モデルトレーニングとデプロイ
187.7K