%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23061b40;%20}%20.st1%20{%20fill:%20%23306af1;%20}%20.st2%20{%20fill:%20%235ce5cf;%20}%20%3c/style%3e%3c/defs%3e%3cg%3e%3cpath%20class='st0'%20d='M55,10.5h9v3h-9v9h12V7.5h-12v3ZM64,19.5h-6v-3h6v3Z'/%3e%3cpolygon%20class='st0'%20points='69%2016.5%2078%2016.5%2078%2019.5%2069%2019.5%2069%2022.5%2081%2022.5%2081%2013.5%2072%2013.5%2072%2010.5%2081%2010.5%2081%207.5%2069%207.5%2069%2016.5'/%3e%3cpolygon%20class='st0'%20points='95%2010.5%2095%207.5%2083%207.5%2083%2022.5%2095%2022.5%2095%2019.5%2086%2019.5%2086%2016.5%2095%2016.5%2095%2013.5%2086%2013.5%2086%2010.5%2095%2010.5'/%3e%3cpath%20class='st0'%20d='M40,1.5v21h11.6l1.4-1.4v-7.6h0c0,0-1.4-1.5-1.4-1.5l1.4-1.4V2.9l-1.4-1.4h-11.6ZM50,19.5h-7v-6h7v6ZM50,10.5h-7v-6h7v6Z'/%3e%3c/g%3e%3cpath%20class='st1'%20d='M23.1,24L14.7,4.8l-4.9,11.2h3.8l-1.8,4H3.3L12.1,0H2C.9,0,0,.9,0,2v20c0,1.1.9,2,2,2h21.1Z'/%3e%3cpath%20class='st2'%20d='M34,0h-16.8l10.6,24h6.2c1.1,0,2-.9,2-2V2C36,.9,35.1,0,34,0ZM32.5,20h-4V4h4v16Z'/%3e%3c/svg%3e)
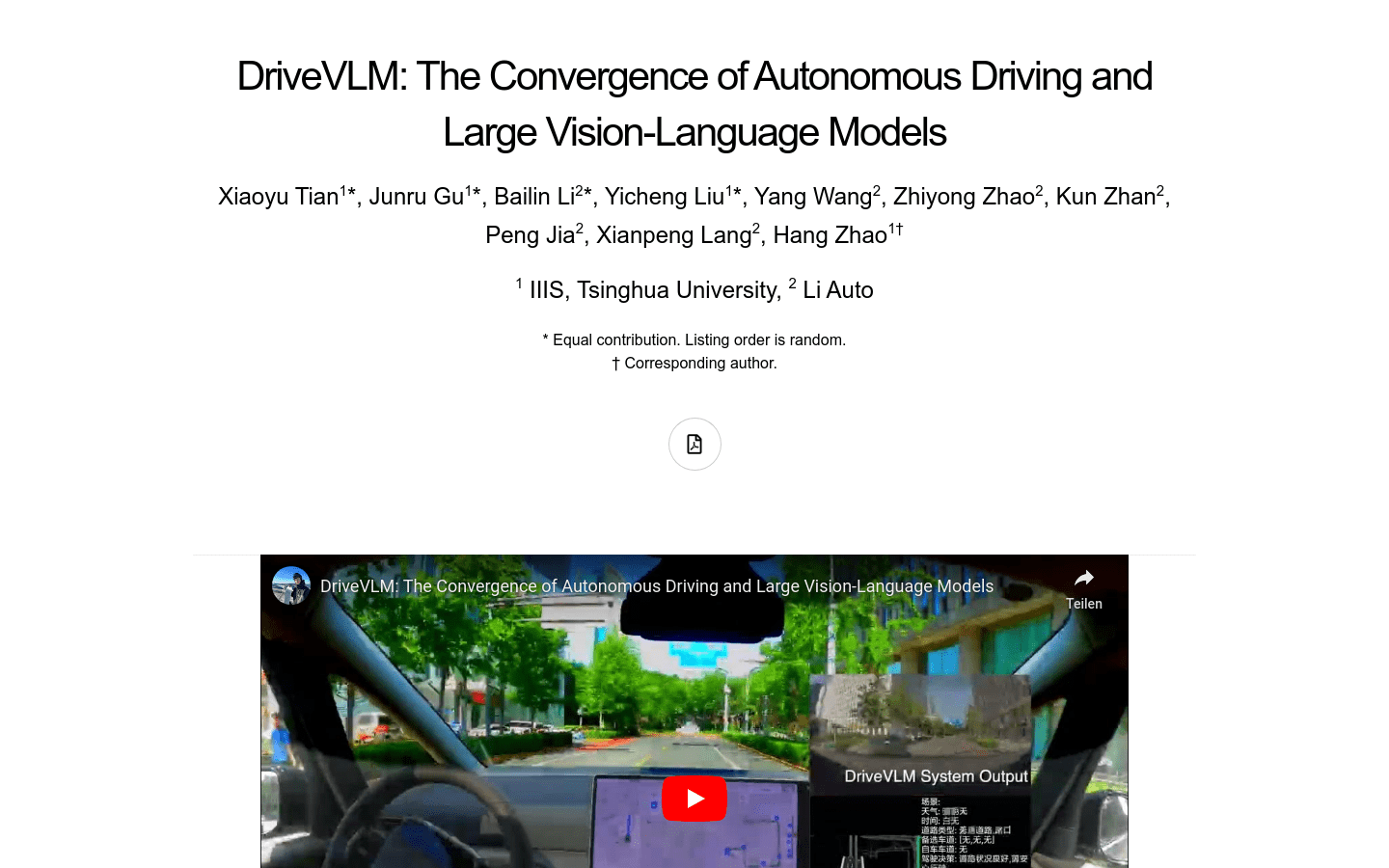
Drivevlm
简介 :
DriveVLM是一个自动驾驶系统,它利用视觉语言模型(VLMs)来增强场景理解和规划能力。该系统通过独特的推理模块组合,包括场景描述、场景分析和分层规划,以提高对复杂和长尾场景的理解。此外,为了解决VLMs在空间推理和计算需求上的局限性,提出了DriveVLM-Dual,这是一个混合系统,结合了DriveVLM的优势和传统自动驾驶流程。在nuScenes数据集和SUP-AD数据集上的实验表明,DriveVLM和DriveVLM-Dual在处理复杂和不可预测的驾驶条件方面非常有效。最终,DriveVLM-Dual在生产车辆上进行了部署,验证了其在现实世界自动驾驶环境中的有效性。
需求人群 :
DriveVLM的目标受众包括自动驾驶领域的研究人员和工程师,以及希望提高自动驾驶系统场景理解和规划能力的企业和组织。该技术特别适合需要处理城市环境中复杂和长尾场景的自动驾驶系统。
使用场景
在城市环境中,DriveVLM能够识别并处理复杂的道路条件和微妙的人类行为。
DriveVLM-Dual在生产车辆上的部署,展示了其在真实世界自动驾驶环境中的实用性。
在nuScenes数据集上的实验,证明了DriveVLM在处理复杂和不可预测的驾驶条件方面的有效性。
产品特色
接受图像序列作为输入,通过基于推理的思考链(CoT)机制输出分层规划预测。
可选地结合传统的3D感知和轨迹规划模块,实现空间推理能力和实时轨迹规划。
数据挖掘和注释流程,构建场景理解数据集。
使用注释者团队进行场景注释,包括场景描述、场景分析和规划。
在nuScenes数据集和SUP-AD数据集上进行实验,验证系统的有效性。
DriveVLM-Dual在生产车辆上部署,验证其在现实世界自动驾驶环境中的有效性。
使用教程
1. 准备图像序列作为输入数据。
%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%230080ff;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st0'%20d='M16.2,11.1c.4.5.4,1.2,0,1.8l-4.7,7.1h-3.8l5.3-8L7.6,4h3.8l4.7,7.1Z'/%3e%3c/svg%3e)
2. 将图像序列输入DriveVLM模型。
3. 利用DriveVLM的推理机制进行场景描述、分析和规划。
4. 根据需要,可选地结合3D感知和轨迹规划模块。
5. 从DriveVLM模型获取分层规划预测结果。
6. 在实际自动驾驶环境中部署DriveVLM-Dual,验证其效果。



精选AI产品推荐

Deepmind Gemini
Gemini是谷歌DeepMind推出的新一代人工智能系统。它能够进行多模态推理,支持文本、图像、视频、音频和代码之间的无缝交互。Gemini在语言理解、推理、数学、编程等多个领域都超越了之前的状态,成为迄今为止最强大的AI系统之一。它有三个不同规模的版本,可满足从边缘计算到云计算的各种需求。Gemini可以广泛应用于创意设计、写作辅助、问题解答、代码生成等领域。
AI模型
11.4M
中文精选
Liblibai
LiblibAI是一个中国领先的AI创作平台,提供强大的AI创作能力,帮助创作者实现创意。平台提供海量免费AI创作模型,用户可以搜索使用模型进行图像、文字、音频等创作。平台还支持用户训练自己的AI模型。平台定位于广大创作者用户,致力于创造条件普惠,服务创意产业,让每个人都享有创作的乐趣。
AI模型
8.0M