%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23061b40;%20}%20.st1%20{%20fill:%20%23306af1;%20}%20.st2%20{%20fill:%20%235ce5cf;%20}%20%3c/style%3e%3c/defs%3e%3cg%3e%3cpath%20class='st0'%20d='M55,10.5h9v3h-9v9h12V7.5h-12v3ZM64,19.5h-6v-3h6v3Z'/%3e%3cpolygon%20class='st0'%20points='69%2016.5%2078%2016.5%2078%2019.5%2069%2019.5%2069%2022.5%2081%2022.5%2081%2013.5%2072%2013.5%2072%2010.5%2081%2010.5%2081%207.5%2069%207.5%2069%2016.5'/%3e%3cpolygon%20class='st0'%20points='95%2010.5%2095%207.5%2083%207.5%2083%2022.5%2095%2022.5%2095%2019.5%2086%2019.5%2086%2016.5%2095%2016.5%2095%2013.5%2086%2013.5%2086%2010.5%2095%2010.5'/%3e%3cpath%20class='st0'%20d='M40,1.5v21h11.6l1.4-1.4v-7.6h0c0,0-1.4-1.5-1.4-1.5l1.4-1.4V2.9l-1.4-1.4h-11.6ZM50,19.5h-7v-6h7v6ZM50,10.5h-7v-6h7v6Z'/%3e%3c/g%3e%3cpath%20class='st1'%20d='M23.1,24L14.7,4.8l-4.9,11.2h3.8l-1.8,4H3.3L12.1,0H2C.9,0,0,.9,0,2v20c0,1.1.9,2,2,2h21.1Z'/%3e%3cpath%20class='st2'%20d='M34,0h-16.8l10.6,24h6.2c1.1,0,2-.9,2-2V2C36,.9,35.1,0,34,0ZM32.5,20h-4V4h4v16Z'/%3e%3c/svg%3e)

Spatiallm
Overview :
SpatialLM is a large language model designed for processing 3D point cloud data. It generates structured 3D scene understanding outputs, including semantic categories of building elements and objects. It can process point cloud data from various sources, including monocular video sequences, RGBD images, and LiDAR sensors, without requiring specialized equipment. SpatialLM has significant application value in autonomous navigation and complex 3D scene analysis tasks, significantly improving spatial reasoning capabilities.
Target Users :
["Researchers: SpatialLM provides researchers in the field of 3D spatial understanding with powerful tools to advance their research.","Developers: Developers can leverage SpatialLM's capabilities to build intelligent robots and automated systems, enhancing product competitiveness.","Educators: Educators can integrate SpatialLM into teaching to help students grasp fundamental concepts of 3D modeling and spatial analysis.","Industry Professionals: Professionals in architecture and design can use SpatialLM to improve design workflows and boost efficiency.","Business Decision Makers: Businesses can utilize SpatialLM's data analysis capabilities for more precise business decisions."]
Use Cases
Use SpatialLM to analyze 3D point cloud data of a building to identify all doors, windows, and wall structures.
Utilize SpatialLM for real-time environment understanding in robot navigation tasks to help robots avoid obstacles.
Develop educational software based on SpatialLM to help students learn 3D modeling and spatial vision.
Features
Handles multiple types of 3D point cloud data: SpatialLM can process point cloud data from various sources such as monocular video, RGBD images, and LiDAR, eliminating the reliance on specialized equipment and offering broader application possibilities.
Generates structured 3D scene understanding output: The model outputs building elements like walls, doors, and windows, along with object bounding boxes with semantic categories, helping users quickly acquire spatial information.
Enhances spatial reasoning capabilities: SpatialLM improves spatial reasoning in robotics and navigation by combining unstructured 3D geometric data with structured 3D representations.
Supports various environment configurations: Users can easily run SpatialLM with simple Python environment setup steps, requiring no complex configurations.
Provides visualization functionality: Users can visualize point clouds and predicted 3D layouts using the Rerun tool for better understanding of model output.
Rich evaluation mechanisms: SpatialLM is equipped with evaluation scripts allowing users to test model performance on multiple benchmark datasets, ensuring output validity and accuracy.
Challenging dataset support: SpatialLM provides 107 pre-processed point cloud datasets, challenging users' scene understanding capabilities in noisy and occluded scenarios.
High-performance benchmarking: Detailed benchmark results are provided, allowing users to understand the performance and advantages of different models in handling specific scenes.
How to Use
Clone the SpatialLM repository: Run `git clone https://github.com/manycore-research/SpatialLM.git` in your command line.
%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%230080ff;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st0'%20d='M16.2,11.1c.4.5.4,1.2,0,1.8l-4.7,7.1h-3.8l5.3-8L7.6,4h3.8l4.7,7.1Z'/%3e%3c/svg%3e)
Navigate to the project directory: Use the command `cd SpatialLM` to enter the repository folder.
Create and activate a virtual environment: Create an environment using `conda create -n spatiallm python=3.11` and activate it with `conda activate spatiallm`.
Install required dependencies: Install CUDA and other dependencies as described in the documentation.
Download example point cloud data: Download the provided point cloud data for testing using huggingface-cli.
Run the inference script: Execute inference using `python inference.py --point_cloud <point cloud file path> --output <output file path> --model_path <model path>`.
Visualize the results: Use the `visualize.py` script to convert the output to Rerun format for visualization.



Featured AI Tools
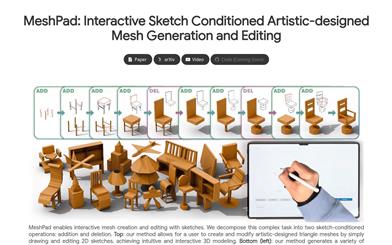
Meshpad
MeshPad is an innovative generative design tool that focuses on creating and editing 3D mesh models from sketch input. It achieves complex mesh generation and editing through simple sketch operations, providing users with an intuitive and efficient 3D modeling experience. The tool is based on triangular sequence mesh representation and utilizes a large Transformer model to implement mesh addition and deletion operations. Simultaneously, a vertex alignment prediction strategy significantly reduces computational cost, making each edit take only a few seconds. MeshPad surpasses existing sketch-conditioned mesh generation methods in mesh quality and has received high user recognition in perceptual evaluation. It is primarily aimed at designers, artists, and users who need to quickly perform 3D modeling, helping them create artistic designs in a more intuitive way.
3D modeling
180.2K
Spatiallm
SpatialLM is a large language model designed for processing 3D point cloud data. It generates structured 3D scene understanding outputs, including semantic categories of building elements and objects. It can process point cloud data from various sources, including monocular video sequences, RGBD images, and LiDAR sensors, without requiring specialized equipment. SpatialLM has significant application value in autonomous navigation and complex 3D scene analysis tasks, significantly improving spatial reasoning capabilities.
3D modeling
152.1K