%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23061b40;%20}%20.st1%20{%20fill:%20%23306af1;%20}%20.st2%20{%20fill:%20%235ce5cf;%20}%20%3c/style%3e%3c/defs%3e%3cg%3e%3cpath%20class='st0'%20d='M55,10.5h9v3h-9v9h12V7.5h-12v3ZM64,19.5h-6v-3h6v3Z'/%3e%3cpolygon%20class='st0'%20points='69%2016.5%2078%2016.5%2078%2019.5%2069%2019.5%2069%2022.5%2081%2022.5%2081%2013.5%2072%2013.5%2072%2010.5%2081%2010.5%2081%207.5%2069%207.5%2069%2016.5'/%3e%3cpolygon%20class='st0'%20points='95%2010.5%2095%207.5%2083%207.5%2083%2022.5%2095%2022.5%2095%2019.5%2086%2019.5%2086%2016.5%2095%2016.5%2095%2013.5%2086%2013.5%2086%2010.5%2095%2010.5'/%3e%3cpath%20class='st0'%20d='M40,1.5v21h11.6l1.4-1.4v-7.6h0c0,0-1.4-1.5-1.4-1.5l1.4-1.4V2.9l-1.4-1.4h-11.6ZM50,19.5h-7v-6h7v6ZM50,10.5h-7v-6h7v6Z'/%3e%3c/g%3e%3cpath%20class='st1'%20d='M23.1,24L14.7,4.8l-4.9,11.2h3.8l-1.8,4H3.3L12.1,0H2C.9,0,0,.9,0,2v20c0,1.1.9,2,2,2h21.1Z'/%3e%3cpath%20class='st2'%20d='M34,0h-16.8l10.6,24h6.2c1.1,0,2-.9,2-2V2C36,.9,35.1,0,34,0ZM32.5,20h-4V4h4v16Z'/%3e%3c/svg%3e)

Vggsfm
简介 :
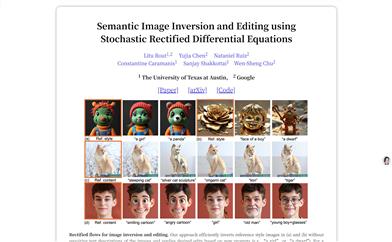
VGGSfM是一种基于深度学习的三维重建技术,旨在从一组不受限制的2D图像中重建场景的相机姿态和3D结构。该技术通过完全可微分的深度学习框架,实现端到端的训练。它利用深度2D点跟踪技术提取可靠的像素级轨迹,同时基于图像和轨迹特征恢复所有相机,并通过可微分的捆绑调整层优化相机和三角化3D点。VGGSfM在CO3D、IMC Phototourism和ETH3D三个流行数据集上取得了最先进的性能。
需求人群 :
VGGSfM主要面向计算机视觉领域的研究人员和开发者,尤其是那些专注于三维重建和深度学习技术的专业人士。该技术可以用于增强现实、虚拟现实、自动驾驶等领域,帮助他们从2D图像中提取出更精确的3D结构信息。
使用场景
在CO3D数据集上进行三维重建
在IMC Phototourism数据集上进行相机和点云重建
在ETH3D数据集上进行相机姿态和3D结构的重建
产品特色
从输入图像中提取2D轨迹
使用图像和轨迹特征重建相机
基于这些轨迹和相机参数初始化点云
应用捆绑调整层进行重建细化
完全可微分的框架设计
在野外应用中重建照片,展示估计的点云和相机
在Co3D和IMC Phototourism上进行相机和点云重建的定性可视化
在每一行中,最左侧的帧包含查询图像和查询点,预测的轨迹点显示在右侧
使用教程
1. 准备一组不受限制的2D图像作为输入
%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%230080ff;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st0'%20d='M16.2,11.1c.4.5.4,1.2,0,1.8l-4.7,7.1h-3.8l5.3-8L7.6,4h3.8l4.7,7.1Z'/%3e%3c/svg%3e)
2. 使用VGGSfM模型从输入图像中提取2D轨迹
3. 利用提取的轨迹和图像特征重建相机
4. 基于轨迹和相机参数初始化点云
5. 应用捆绑调整层进行点云和相机的重建细化
6. 对重建结果进行评估和优化,确保精度和可靠性
7. 将重建的3D结构应用于相关领域,如增强现实、虚拟现实等




精选AI产品推荐
中文精选

剪映dreamina
剪映Dreamina是抖音旗下的AIGC工具,用户可以根据文本内容生成由AI生成的创意图,支持修整图片大小比例和模板类型。未来会用于抖音的图文或短视频的内容创作,丰富抖音在AI创造方面的内容库。
AI图像生成
9.1M
Outfit Anyone
Outfit Anyone 是一款超高质量虚拟试穿产品,使用户能够在不真实试穿衣物的情况下尝试不同的时尚款式。通过采用两个流的条件扩散模型,Outfit Anyone 能够灵活处理衣物变形,生成更逼真的效果。它具备可扩展性,可以调整姿势和身体形状等因素,适用于动漫角色到真实人物的图像。Outfit Anyone 在各种场景下的表现突出了其实用性和准备好投入实际应用的程度。
AI图像生成
5.7M