%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23061b40;%20}%20.st1%20{%20fill:%20%23306af1;%20}%20.st2%20{%20fill:%20%235ce5cf;%20}%20%3c/style%3e%3c/defs%3e%3cg%3e%3cpath%20class='st0'%20d='M55,10.5h9v3h-9v9h12V7.5h-12v3ZM64,19.5h-6v-3h6v3Z'/%3e%3cpolygon%20class='st0'%20points='69%2016.5%2078%2016.5%2078%2019.5%2069%2019.5%2069%2022.5%2081%2022.5%2081%2013.5%2072%2013.5%2072%2010.5%2081%2010.5%2081%207.5%2069%207.5%2069%2016.5'/%3e%3cpolygon%20class='st0'%20points='95%2010.5%2095%207.5%2083%207.5%2083%2022.5%2095%2022.5%2095%2019.5%2086%2019.5%2086%2016.5%2095%2016.5%2095%2013.5%2086%2013.5%2086%2010.5%2095%2010.5'/%3e%3cpath%20class='st0'%20d='M40,1.5v21h11.6l1.4-1.4v-7.6h0c0,0-1.4-1.5-1.4-1.5l1.4-1.4V2.9l-1.4-1.4h-11.6ZM50,19.5h-7v-6h7v6ZM50,10.5h-7v-6h7v6Z'/%3e%3c/g%3e%3cpath%20class='st1'%20d='M23.1,24L14.7,4.8l-4.9,11.2h3.8l-1.8,4H3.3L12.1,0H2C.9,0,0,.9,0,2v20c0,1.1.9,2,2,2h21.1Z'/%3e%3cpath%20class='st2'%20d='M34,0h-16.8l10.6,24h6.2c1.1,0,2-.9,2-2V2C36,.9,35.1,0,34,0ZM32.5,20h-4V4h4v16Z'/%3e%3c/svg%3e)

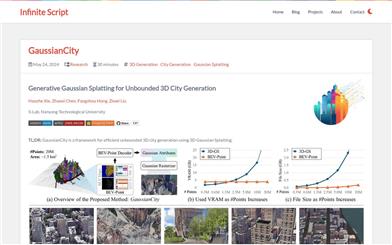
Gaussiancity
Overview :
GaussianCity is a framework focused on efficiently generating boundless 3D cities, based on 3D Gaussian rendering technology. This technology, through compact 3D scene representation and a spatially aware Gaussian attribute decoder, solves the memory and computational bottlenecks encountered by traditional methods when generating large-scale city scenes. Its main advantage is the ability to quickly generate large-scale 3D cities in a single forward pass, significantly outperforming existing technologies. This product was developed by the S-Lab team at Nanyang Technological University, with the related paper published in CVPR 2025. The code and models have been open-sourced and are suitable for researchers and developers who need to efficiently generate 3D city environments.
Target Users :
This product is suitable for researchers, developers, and professionals in related fields who need to efficiently generate large-scale 3D city environments, especially for applications with high requirements for real-time performance and memory efficiency.
Use Cases
Quickly generate large-scale 3D city environments from a drone perspective.
Generate realistic city details from a street-level perspective for simulation and planning.
Researchers can further extend and optimize city generation algorithms by combining open-source models and code.
Features
Compact 3D scene representation, achieving constant memory growth through BEV-Point intermediate representation.
Spatially aware Gaussian attribute decoder, combining structural and contextual features to generate 3D Gaussian attributes.
Supports boundless 3D city generation, suitable for large-scale scenes.
Compared to methods such as CityDreamer, the speed is increased by 60 times, reaching 10.72 FPS.
Open-source code and models for easy research and development extension.
How to Use
1. Visit the project homepage and download the open-source code and models.
%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%230080ff;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st0'%20d='M16.2,11.1c.4.5.4,1.2,0,1.8l-4.7,7.1h-3.8l5.3-8L7.6,4h3.8l4.7,7.1Z'/%3e%3c/svg%3e)
2. Configure the running environment and ensure that the dependencies and hardware requirements are met.
3. Use the BEV-Point representation to define the initial parameters of the city scene.
4. Call the spatially aware Gaussian attribute decoder to generate 3D Gaussian attributes.
5. Render the generated Gaussian points into a 3D city scene using a rendering engine.
6. Adjust parameters to optimize the generation effect, such as viewpoint and detail level.
7. Save the generated city model or real-time rendering results for further research or application.



Featured AI Tools
English Picks

Luma AI
Luma AI is an AI-focused technology company that enables users to quickly generate 3D models using their phones through its innovative technology. Founded by a team with extensive experience in 3D computer vision, Luma AI's technology is based on Neural Radiance Fields, allowing for 3D scene modeling from a limited number of 2D images. Dream Machine is an AI model capable of directly generating high-quality, realistic videos from text and images. It is a highly scalable and efficient transformer model trained specifically for video, capable of generating physically accurate, consistent, and event-filled shots. Dream Machine represents the first step toward building a universal imagination engine, now accessible to everyone.
3D Modeling
3.6M

Devin
Devin is the world's first fully autonomous AI software engineer. With long-term reasoning and planning capabilities, Devin can execute complex engineering tasks and collaborate with users in real time. It empowers engineers to focus on more engaging problems and helps engineering teams achieve greater objectives.
Development and Tools
1.7M