%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23061b40;%20}%20.st1%20{%20fill:%20%23306af1;%20}%20.st2%20{%20fill:%20%235ce5cf;%20}%20%3c/style%3e%3c/defs%3e%3cg%3e%3cpath%20class='st0'%20d='M55,10.5h9v3h-9v9h12V7.5h-12v3ZM64,19.5h-6v-3h6v3Z'/%3e%3cpolygon%20class='st0'%20points='69%2016.5%2078%2016.5%2078%2019.5%2069%2019.5%2069%2022.5%2081%2022.5%2081%2013.5%2072%2013.5%2072%2010.5%2081%2010.5%2081%207.5%2069%207.5%2069%2016.5'/%3e%3cpolygon%20class='st0'%20points='95%2010.5%2095%207.5%2083%207.5%2083%2022.5%2095%2022.5%2095%2019.5%2086%2019.5%2086%2016.5%2095%2016.5%2095%2013.5%2086%2013.5%2086%2010.5%2095%2010.5'/%3e%3cpath%20class='st0'%20d='M40,1.5v21h11.6l1.4-1.4v-7.6h0c0,0-1.4-1.5-1.4-1.5l1.4-1.4V2.9l-1.4-1.4h-11.6ZM50,19.5h-7v-6h7v6ZM50,10.5h-7v-6h7v6Z'/%3e%3c/g%3e%3cpath%20class='st1'%20d='M23.1,24L14.7,4.8l-4.9,11.2h3.8l-1.8,4H3.3L12.1,0H2C.9,0,0,.9,0,2v20c0,1.1.9,2,2,2h21.1Z'/%3e%3cpath%20class='st2'%20d='M34,0h-16.8l10.6,24h6.2c1.1,0,2-.9,2-2V2C36,.9,35.1,0,34,0ZM32.5,20h-4V4h4v16Z'/%3e%3c/svg%3e)
Rekep
Overview :
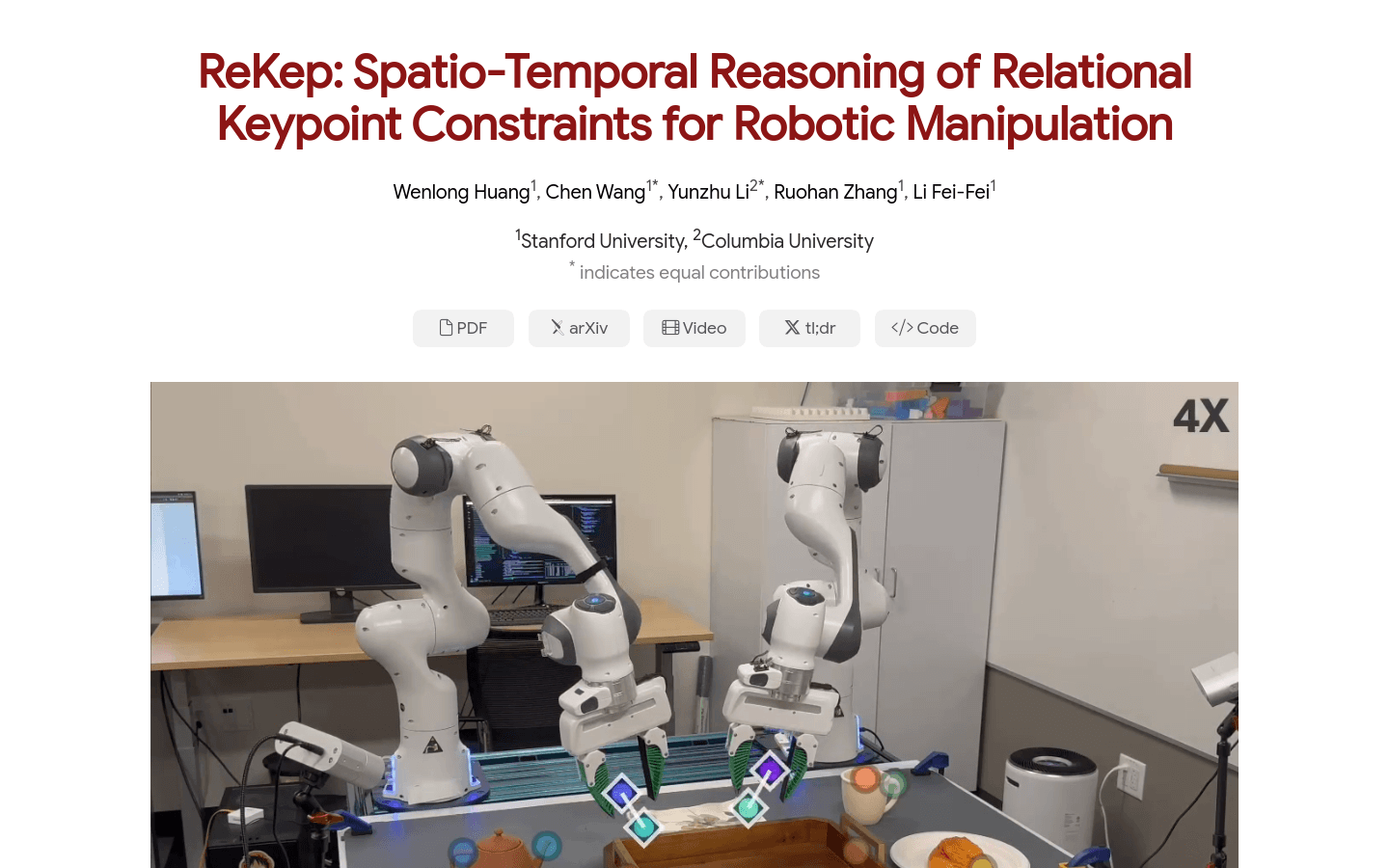
ReKep is a system for spatiotemporal constraint inference on robotic manipulation, encoding desired robotic behavior by representing manipulation tasks as constraints between the robot and its environment. Leveraging large visual models and vision-language models, ReKep generates keypoint-based constraints that can be optimized for multi-stage, field, dual-hand, and reactive behaviors without requiring specific task training or environmental modeling. Key advantages of ReKep include its versatility, lack of manual annotation, and the capability for real-time optimization by off-the-shelf solvers to produce robot actions.
Target Users :
The target audience for ReKep includes researchers and engineers in the fields of robotics, automation, and artificial intelligence. It is designed for professionals who need to develop robotic systems capable of understanding and executing complex manipulation tasks.
Use Cases
In multi-stage tasks, ReKep can optimize robot actions to fold various types of clothing.
In outdoor environments, ReKep enables robots to adapt to changes in the environment, such as random shifts in object positions during operation.
ReKep supports dual-hand manipulation tasks, such as simultaneously operating two robotic arms for complex assembly tasks.
Features
Generate keypoint candidates using RGB-D observations and free-form language instructions.
Create ReKep constraints as Python programs through DINOv2 and GPT-4o.
Employ a hierarchical optimization approach to solve for robotic actions.
Conduct real-time closed-loop replanning, including both intra-stage and inter-stage replanning.
Support dual-hand manipulation tasks.
Perform manipulation tasks in outdoor environments.
Generate different strategies for the same task.
How to Use
1. Prepare RGB-D observations and free-form language instructions.
%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%230080ff;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st0'%20d='M16.2,11.1c.4.5.4,1.2,0,1.8l-4.7,7.1h-3.8l5.3-8L7.6,4h3.8l4.7,7.1Z'/%3e%3c/svg%3e)
2. Use DINOv2 to identify key points in the scene.
3. Input the key points and instructions into GPT-4o to generate ReKep constraints.
4. Utilize a hierarchical optimization process to solve for robotic actions.
5. Perform real-time closed-loop replanning to adapt to environmental changes.
6. Execute robot action sequences to accomplish tasks.
7. Adjust and optimize ReKep constraints as needed.


Featured AI Tools
Openui
Building UI components is often tedious work. OpenUI aims to make this process fun, quick, and flexible. This is the tool we use at W&B to test and prototype the next generation of tools, built on top of LLMs to create powerful applications. You can describe your UI with imagination, and then see the rendering effect in real time. You can request changes, and convert HTML to React, Svelte, Web Components, and more. Think of it as an open-source and less polished version of a V0.
AI Development Assistant
757.9K
Opendevin
OpenDevin is an open-source project aiming to replicate, enhance, and innovate Devin—an autonomous AI software engineer capable of executing complex engineering tasks and actively collaborating with users on software development projects. Through the power of the open-source community, the project explores and expands Devin's capabilities, identifies its strengths and areas for improvement, thus guiding the advancement of open-source code models.
AI Development Assistant
594.8K