%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23061b40;%20}%20.st1%20{%20fill:%20%23306af1;%20}%20.st2%20{%20fill:%20%235ce5cf;%20}%20%3c/style%3e%3c/defs%3e%3cg%3e%3cpath%20class='st0'%20d='M55,10.5h9v3h-9v9h12V7.5h-12v3ZM64,19.5h-6v-3h6v3Z'/%3e%3cpolygon%20class='st0'%20points='69%2016.5%2078%2016.5%2078%2019.5%2069%2019.5%2069%2022.5%2081%2022.5%2081%2013.5%2072%2013.5%2072%2010.5%2081%2010.5%2081%207.5%2069%207.5%2069%2016.5'/%3e%3cpolygon%20class='st0'%20points='95%2010.5%2095%207.5%2083%207.5%2083%2022.5%2095%2022.5%2095%2019.5%2086%2019.5%2086%2016.5%2095%2016.5%2095%2013.5%2086%2013.5%2086%2010.5%2095%2010.5'/%3e%3cpath%20class='st0'%20d='M40,1.5v21h11.6l1.4-1.4v-7.6h0c0,0-1.4-1.5-1.4-1.5l1.4-1.4V2.9l-1.4-1.4h-11.6ZM50,19.5h-7v-6h7v6ZM50,10.5h-7v-6h7v6Z'/%3e%3c/g%3e%3cpath%20class='st1'%20d='M23.1,24L14.7,4.8l-4.9,11.2h3.8l-1.8,4H3.3L12.1,0H2C.9,0,0,.9,0,2v20c0,1.1.9,2,2,2h21.1Z'/%3e%3cpath%20class='st2'%20d='M34,0h-16.8l10.6,24h6.2c1.1,0,2-.9,2-2V2C36,.9,35.1,0,34,0ZM32.5,20h-4V4h4v16Z'/%3e%3c/svg%3e)

Gaussian SLAM
Overview :
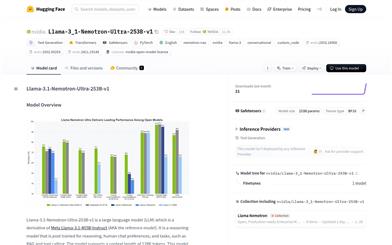
Gaussian SLAM is capable of reconstructing renderable 3D scenes from RGBD data streams. It is the first neural RGBD SLAM method capable of reconstructing real-world scenes with photorealistic fidelity. By leveraging 3D Gaussian as the primary unit for scene representation, we overcome the limitations of previous methods. We observe that traditional 3D Gaussians are difficult to utilize in monocular settings: they fail to encode accurate geometric information and are challenging to optimize sequentially with single-view supervision. By extending traditional 3D Gaussians to encode geometric information and designing a novel scene representation as well as a method for its growth and optimization, we propose an SLAM system that can reconstruct and render real-world datasets while maintaining speed and efficiency. Gaussian SLAM is able to reconstruct and render real-world scenes with photorealistic fidelity. We evaluate our method on common synthetic and real-world datasets, comparing it against other state-of-the-art SLAM methods. Finally, we demonstrate that the resulting 3D scene representation can be efficiently rendered in real-time using Gaussian splatting.
Target Users :
Suitable for scenarios requiring reconstruction and rendering of real-world environments, such as virtual reality, augmented reality, and game development.
Use Cases
In virtual reality applications, use Gaussian SLAM to reconstruct and render real-world environments.
In game development, utilize Gaussian SLAM to real-time render reconstructed 3D scenes.
In augmented reality applications, leverage Gaussian SLAM to reconstruct and render real-world environments.
Features
Reconstruct renderable 3D scenes
Reconstruct real-world scenes with photorealistic fidelity
Real-time rendering of reconstructed 3D scenes

Featured AI Tools

Gemini
Gemini is the latest generation of AI system developed by Google DeepMind. It excels in multimodal reasoning, enabling seamless interaction between text, images, videos, audio, and code. Gemini surpasses previous models in language understanding, reasoning, mathematics, programming, and other fields, becoming one of the most powerful AI systems to date. It comes in three different scales to meet various needs from edge computing to cloud computing. Gemini can be widely applied in creative design, writing assistance, question answering, code generation, and more.
AI Model
11.4M
Chinese Picks
Liblibai
LiblibAI is a leading Chinese AI creative platform offering powerful AI creative tools to help creators bring their imagination to life. The platform provides a vast library of free AI creative models, allowing users to search and utilize these models for image, text, and audio creations. Users can also train their own AI models on the platform. Focused on the diverse needs of creators, LiblibAI is committed to creating inclusive conditions and serving the creative industry, ensuring that everyone can enjoy the joy of creation.
AI Model
6.9M